本ページでは,これまでに日本ロボット学会誌に掲載された解説記事の中から注目度の高い記事をHTML形式で紹介しています.HTMLへの変換時に著者紹介,キーワードなど一部の情報は省略しています.また,レイアウトはオリジナル記事とは異なります.
PDF形式のオリジナル記事はこちらでご覧になれます.引用する際は,本Webページではなくオリジナル記事を引用してください.
1 不気味の谷再び
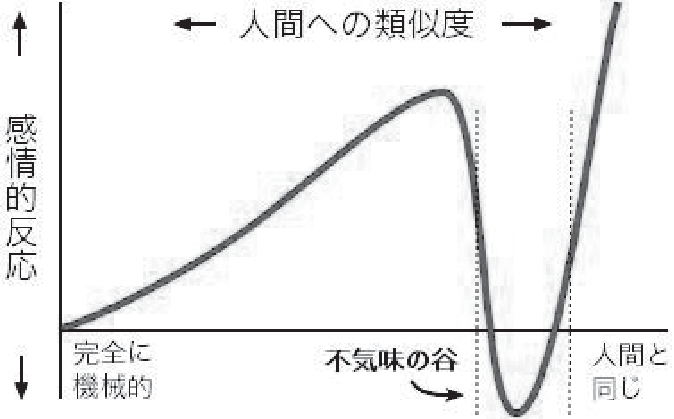
ロボットやエージェントなどの人工物は,その外見(appearance)や動き(motion)が日々現実の生物に近づいていると言える.また合成音声や実物を模した3D 映像なども,実物と区別がつかないほどにリアルになってきた.これらの人工物から人が受ける印象は,その人工物の実物への類似度と深い関係があると言われてきた.その代表的な説が,森による「不気味の谷現象」説 [1] である.実物(特に人間)との類似度がまったくないものに人は親近感などの好印象を抱かないが,類似度が徐々に上がるにつれ好印象を抱くようになる.しかしながら,実物の少し一歩手前まで類似度が上ると,人はとたんに嫌悪感を抱くようになる.さらに,実物と見分けがつかないほどになると,人は一転して好印象を抱く.この関係をグラフにするとV 字型を示すこと(図1)から「不気味の谷現象」と言われている.映画「ファイナルファンタジー」の興行的な失敗はしばしば不気味の谷にあるとされている.実験に基づいて提唱された説ではないので科学性に欠けるという批判もあるが,ロボット研究者にはおなじみの説である.
この不気味の谷現象において「人間との類似度」とは何であろうか.様々な観点(例えば知能の観点)から人間と人工物の間の類似性を議論することが可能であろうが,不気味の谷現象に関する多くの説明では,暗黙的に,外見や動きという視覚的特徴からみた類似性を問題にしているように筆者には思える.しかしながら,ぬいぐるみは実際の動物に必ずしも似ているとは言えない上に(実物の動物に酷似していたらむしろ恐い),動かないにもかかわらず,少なくとも一部の人にとっては不気味の谷の右側に位置し,限りなく人間に近い存在になっている.このことは,図1 の横軸に示された人間との類似性には,しばしば暗黙裡に仮定されている外見や動きといった観点に基づく類似性以外のものが含まれていることを示唆していよう.
不気味さの感覚の基盤にあるのは,対象に生物らしさを感じる感覚,すなわちアニマシー知覚(animacy perception)である.本稿では,図1 に示した不気味の谷現象の縦軸(人工物に対する親近感)をロボット,エージェントなどの人工物に感じる生物らしさと読み替え,横軸を従来とは違った角度から眺めることで,人工物に対するアニマシー知覚に関する議論を整理し,人工物に接する人の知識に基づく予測や主観がアニマシー知覚に与える影響について議論する.
2 ボトムアップな知覚としてのアニマシー知覚
生物(人間)らしい外見や動きとは,対象がもつ生物らしい特徴である.そのような特徴に基づいて対象が生物であるかどうかを判断するアニマシー知覚は自動的に生じると考えられるので,ボトムアップな知覚だと言うことができる.これまでの不気味の谷現象に関する議論では,横軸に生物らしい特徴を想定し,縦軸にはそのような特徴に基づいて自動的に生じるボトムアップな知覚現象の結果を投影していたと理解できる.
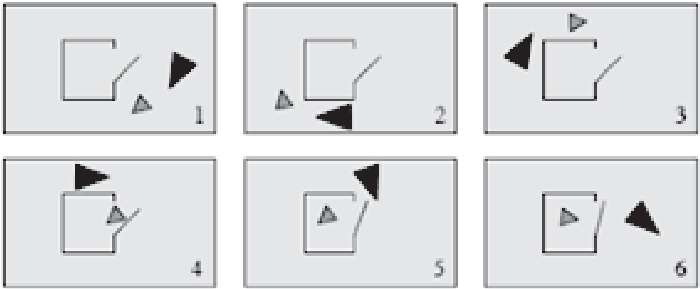
実験心理学では古くからアニマシー知覚が実験的に検討されてきた.Heider らは,幾何学図形を用い,たとえ対象が単なる幾何学図形であっても,その運動によって観察者はそれがあたかも生物であるかのようにみなすことを明らかにした [2].図2 に示すようなアニメーションを説明するように求められた実験参加者たちは,単なる三角形や円の運動をそれらの図形の意図や感情によって説明した.さらに,Michotte は単純な幾何学図形の運動から意図や性格などを感じる現象を系統的に調べ,このような単純な刺激でも社会的な知覚を引き起こすのに十分であることを確認し,アニマシー知覚が他の知覚現象からの解釈によって生じるのではなく,直接知覚されていると主張した [3].これらの古典的な研究以外にも,図21 に示したHeider and Simmel 型のアニメーションにおける二つの図形の運動の時間的随伴性2 と空間配置を独立変数として操作して運動を変化させ,時間的随伴性が二つの図形の間の相互作用の有無を,空間配置がその相互作用の質を決めることを明らかにした研究 [4] や,一つだけの対象が,その速度と方向に関して一度だけ運動を変化させるアニメーションを用いた実験により,運動の変化のみでもアニマシー知覚が起こること,並びにその変化量が大きいほど感じられるアニマシーも大きいことを示した研究 [5],運動から感じられる目標志向性が高いほど感じられるアニマシーも大きいことを示した研究 [6] などが存在する.このように知覚心理学では,アニマシー知覚が対象の見た目よりも運動によって引き起こされていることを明らかにしてきた.
また発達心理学では,乳幼児が生物と非生物を区別する際に用いている特徴として,顔と目を持つこと [7] といった外見的特徴や自己推進運動をすること [8] といった運動特徴のほかに,他者との相互作用における随伴性(contingency)が指摘されている.例えばCsibra は,対象がもつ運動の目標志向性並びに他者との相互作用における随伴性から,幼児は対象がもつ意図を理解すると述べている [9].
このように多くの心理学研究において,ボトムアップに生じる知覚現象としてのアニマシー知覚を探究し,主に対象がもつ運動特徴と,対象が人と相互作用するときの随伴性に,その要因を求めてきたと言えよう.しかしながら,このような観点からだけでは,アニマシー知覚やその結果として生じると考えられる不気味の谷現象を理解するのが難しいことは,1 章で述べたとおりである.
3 トップダウンな認知とボトムアップな知覚の齟語としての不気味の谷現象
最近になって,この不気味の谷現象の存在やそれが生じる原因を科学的に検討する研究がいくつか報告されるようになった.これらの研究はいずれも,2 章で説明したボトムアップな知覚としてのアニマシー知覚と,人がもっている知識からの予測(以降,これをトップダウンな認知と呼ぶ)との間の不整合(齟齬)が不気味の谷現象を生んでいることを示唆するものだと理解できる.
山田らは,不気味の谷現象が生じる原因を心理学的に検討した [10].人は対象を認識する際に,しばしば既存のカテゴリーに当てはめて,つまりカテゴリー化して理解する.山田らは,実物の人(犬)の写真と人(犬)の漫画などのカテゴリーが異なるものどうしの間でモーフィングして作成した画像を用いて,不気味の谷における対象に対するネガティブな印象がその対象のカテゴリー化が困難なときに生じることを実験的に示した.これは,対象からボトムアップに知覚される要素と,人が知識としてもっているカテゴリーからのトップダウンな予測とが矛盾する場合に,不気味さが生じることを示唆している.
上記の研究以外にも,不気味の谷現象が,ロボットの見た目から予測される動きと実際の動きとに乖離があるために起こってしまう可能性を,fMRI を用いた計測により示唆した報告 [11]3 もある.さらに小松らは,エージェントの実際の機能と人がエージェントの外見から予想する機能との差を意味する「適応ギャップ」という概念を提案し,エージェントの外見から予想される機能が実際の機能に等しいか劣るように設計することがエージェントの外見設計にとって重要だと主張している [12].
これらの研究から考えると,図1 に示した不気味の谷現象の横軸には,2 章で説明した,アニマシー知覚をボトムアップに生じさせる外見や動きなどの人間らしい特徴以外に,本章のテーマである,トップダウンな認知を構成する人がもっている知識からの予測,さらには対象に対する主観も含まれていると理解するのが適当なように思われる.そうすれば,1 章で挙げたぬいぐるみの例も理解できよう.対象が何であるか認識できない場合でも,人は対象に生物性を感じることがあるが,それはこのようなトップダウンの認知がアニマシー知覚に影響しているからではないだろうか.
4 「ボトムアップ処理vs. トップダウン処理」とアニマシー知覚の脳内機序
アニマシー知覚は社会性認知(social cognition)において重要な役割をもつ [3] と考えられているため,最近ではアニマシー知覚の脳内機序も盛んに研究されている.アニマシー知覚に関する脳内機構として二つの候補が挙げられている [13].一つは,頭頂葉下部と左前頭下部を含むミラーシステムである.これは,模倣や他者理解において重要な役割を担う部位だと考えられている.もう一つは,上側頭溝や内側前頭皮質を含む社会ネットワークシステムである.これは,顔検出や視線方向検出,バイオロジカルモーション知覚に関連した部位である.
アニマシー知覚に関連したこれら二つのシステムの役割はこれまで明確には分かっていなかった.筆者らは,実際の生物(カメ)と小型ロボットを実験刺激として用い,外見では区別できないようにこれらの実験刺激に覆いを被せた上で,小型ロボットの動きを実際のカメの動きそのものから等速直線運動にまで変化させて,感じられるアニマシーを脳波の一種である事象関連電位を用いて計測した [14].その結果,実際に対象が何であれ対象を生物だと思っていることとミラーシステム(左前頭下部)の活動とが,また対象の運動の生物らしさと社会ネットワークシステム(上側頭溝)の活動とが相関していることを見いだした.これは,ミラーシステムがトップダウンな認知としてのアニマシー知覚に,社会ネットワークがボトムアップな知覚としてのアニマシー知覚に関与していることを示唆している.このように,アニマシー知覚はトップダウンとボトムアップの二つの処理から構成されていると考えられる.
5 「かわいい」がもつ機能—むすびにかえて
不気味の谷現象を出発点として,ここまで人が人工物に対して感じる生物らしさの知覚に関する研究のいくつかを紹介してきた.
ところで「不気味の谷現象」は,人工物を人にとって親近感のある存在にするという問題意識から指摘された現象だと理解できる.そうだとしたら,「不気味さ」ではなく,いま流行の「かわいい」(かわいらしさ)に直接焦点を当てても良いはずである.実際,PaPeRo にしてもrobovie-mR2 にしても,その外見はかわいらしい.
最近,かわいいものを見ると気分が良くなるだけでなく,単純作業における集中力が高まることが実験的に示された [15].これまでの不気味の谷現象やアニマシー知覚に関する研究は,これらの現象や知覚を生み出す要因を主に検討してきた.それに対して,上記の研究の面白いところは,「かわいい」を生み出すものは何かではなく,「かわいい」がもっている機能を検討した点にあると言える.実際,かわいいrobovie-mR2 が社会ゲームで対戦相手である人に対して不利な提案をする状況でも,その人に社会的な接触を行った場合には,感じられる不快さが減じることも示されている [16].今後は,生物らしさ,かわいらしさ,不気味さがもつ機能にもっと焦点が当たっても良いのかもしれない.
謝辞
本稿で紹介した筆者らの研究は,科学研究費補助金(課題番号21118005)の助成を受けて実施された.ここに謝意を表す.
参考文献
[1] 森:“不気味の谷”,Energy, vol.7, no.4, pp.33–35, 1970.
[2] F. Heider and M. Simmel: “An experimental study of apparent behavior,” American Journal of Psychology, vol.57, no.2, pp.243–249, 1944.
[3] A. Michotte: The perception of causality. BasicBooks, 1963.
[4] J.N. Bassili: “Temporal and spatial contingencies in the perception of social events,” Journal of Personality and Social Psychology, vol.33, no.6, pp.680–685, 1976.
[5] P.D. Tremoulet and J. Feldman: “Perception of animacy from the motion of a single object,” Perception, vol.29, no.8, pp.943–951, 2000.
[6] P.D. Tremoulet and J. Feldman: “The influence of spatial context and the role of intentionality in the interpretation of animacy from motion,” Perception and Psychophysics, vol.68, no.6, pp.1047–1058, 2006.
[7] S. Carey and E. Spelke: “Science and core knowledge,” Philosophy of Science, vol.63, no.4, pp.513–533, 1996.
[8] L. Markson and E. Spelke: “Infants’ Rapid Learning About Self-Propelled Objects,” Infancy, vol.9, no.1, pp.45–71, 2006.
[9] G. Csibra: “Goal attribution to inanimate agents by 6.5-month-old infants,” Cognition, vol.107, no.2, pp.705–717, 2008.
[10] Y. Yamada, T. Kawabe and K. Ihaya: “Categorization difficulty is associated with negative evaluation in the “uncanny valley” phenomenon,” Japanese Psychological Research, vol.55, no.1, pp.20–32, 2013.
[11] A.P. Saygin, T. Chaminade, H. Ishiguro, J. Driver and C. Frith: “The thing that should not be: predictive coding and the uncanny valley in perceiving human and humanoid robot actions,” Social Cognitive and Affective Neuroscience, vol.7, no.4, pp.413–422, 2012.
[12] T. Komatsu and S. Yamada: “Adaptation gap hypothesis: How differences between users’ expected and perceived agent functions affect their subjective impression,” Journal of Systemics, Cybernetics and Informatics, vol.9, no.1, pp.67–74, 2011.
[13] T. Wheatley, S.C. Milleville and A. Martin: “Understanding animate agents: distinct roles for the social network and mirror system,” Psychological Science, vol.18, no.6, pp.469–474, 2007.
[14] 福田,植田:“実際の生物を用いたアニマシー知覚の脳内基盤の検討”,認知科学,vol.18, no.1, pp.64–78, 2011.
[15] H. Nittono, M. Fukushima, A. Yano and H. Moriya: “The Power of Kawaii: Viewing Cute Images Promotes a Careful Behavior and Narrows Attentional Focus,” PLOS ONE, vol.7, no.9, pp.1–7, 2012.
[16] H. Fukuda, M. Shiomi, K. Nakagawa and K. Ueda: “ ‘Midas Touch’ in Human-Robot Interaction: Evidence from Event-Related Potentials during the Ultimatum Game,” Proc. of 7th ACM/IEEE International Conference on Human-Robot Interaction, pp.131–132, 2012.
1 図2 に示した6 フレームは,1 から6 へ時間順に並んでいる.多くの実験参加者が,灰色の三角が黒い三角に追いかけられているなど幾何学図形を擬人化して理解していた.このことは,対象の見た目ではなく運動がアニマシー知覚の手がかりとなっていることを示唆している.
2 ある対象が起こしたアクションに呼応して別に対象がアクションを起こすことを「随伴性」と言う.
3 具体的には,人間(biological appearance & biological motion),ロボット(mechanical appearance & mechanical motion),アンドロイド(biological appearance & mechanical motion)のそれぞれが手を振ったり頷いたりする際に,それらの動きを見る実験参加者の脳活動をfMRI により計測した.その結果,アンドロイドの動きを見たときに,様々な感覚の統合を行うとされる両側の前頭頂間溝の活動が大きいことが分かった.このことは,人間に似ている見た目とロボット様の動きというミスマッチから予測エラーが発生していることを示唆している.

![[論文再掲]大規模な三次元環境地図とRGB-Dカメラを用いた移動ロボットの広域位置同定](content/images/pastpdf/31_31_896.png)
