本ページでは,これまでに日本ロボット学会誌に掲載された解説記事の中から注目度の高い記事をHTML形式で紹介しています.HTMLへの変換時に著者紹介,キーワードなど一部の情報は省略しています.また,レイアウトはオリジナル記事とは異なります.
PDF形式のオリジナル記事はこちらでご覧になれます.引用する際は,本Webページではなくオリジナル記事を引用してください.
1 はじめに
筋骨格型ヒューマノイドの研究には,人間の身体構造を学びそこから示唆を得ることで,従来のヒューマノイドやロボットで解決できていない問題の解決につながる可能性を考えるという面がある [1].本稿では,筋骨格型ヒューマノイドの意義をいくつかの側面から考察し,筆者のグループによる筋骨格型ヒューマノイド研究を中心に技術的な詳細を解説する.
2 筋骨格型ヒューマノイド研究
本章では,筋骨格型ヒューマノイド研究の意義をいくつかの側面から考察し,これまでの取り組みの概要を紹介する.
2.1 工場から家庭へ(本質的な違い)
産業現場はロボットがこれまでに最も成功した活躍の場である.人の生活の場が次の大きなロボットの活躍の場として期待されているが,工場と家庭には次のような本質的な違いがあると考えられる.人間の構造に学ぶことはこれらの問題を解決する一つの方法である可能性がある.
産業現場でのロボットが取り扱う対象物は,その取り扱いに必要な情報をロボットはすべて持っている.家庭や屋外自然環境等で活動するロボットを想定すると,取り扱う環境や対象物のモデルを完全に記述しておくことは困難であり,適応的に振る舞うことができる能力が必要とされる.
家庭環境ではロボットは人や環境との接触は不可避である.安全性を担保するためには工夫が必要であり,大きな力を出すことができるけれど安全に活動できる人間に学ぶことは,生活空間での安全実現のために重要であろう.
これまでの機械の設計と制御における方法論は,精度と速度を重視し高剛性であることが望ましかった.これはロボットの利用による効果を最大化するための常套手段であった.しかし,柔軟性・安全性・適応性が重視される人の生活の場では,考え方を変える必要があるかもしれない.我々人間の身体設計と制御は,精度や速度はロボットに劣っても器用さ・適応性や対応可能なタスクの多様性で勝る.家庭内で実用的になるためには,従来の機械の設計・制御のパラダイム転換が必要である可能性がある.
2.2 人体構造に学ぶロボット構成法
人体の構造は受動関節から成る超多自由度構造を無数の筋により駆動するという構成である.
人体構造は既存のロボットに比べると非常に多自由度である.ロボットの自由度を増やすとその分アクチュエータを増やさなければならない.回転関節が直列に連なる構造を駆動する場合それぞれの関節が重力による力を支える力を発揮する必要があるが,多関節筋を多用する構成は複数の筋で協調して駆動することが可能であり,アクチュエータの総重量を抑えることができる,このような仕組みは,干渉駆動 [2] とも呼ばれる.
人体構造は物理的な柔軟性を有する構造である.ロボットの身体に物理的柔軟性を持たせようとする研究はいろいろと行われてきている [3].関節自体が受動関節であるというのは柔軟性を組み込みやすい.物理的な弾性要素は,力の急変への即応性(による安全性・スムーズさ),バックドライバビリティ,弾性エネルギー蓄積・解放の運動への活用(瞬間速度や瞬間力の向上,繰り返し動作による高エネルギー状態の実現),復元力による重力に逆らう力の発揮,等の利点がある [4, 5].
人間は,日々変化する身体・環境において発達的に制御法を獲得し続けることができる.人体構造に学ぶ身体構成のロボットはその仕組みを解明するためのアプローチともなる可能性がある.つまり,構成論的にヒトの仕組みにせまるアプローチであり,ロボティック・サイエンス [6] の思想とも深く関連がある.
人の目に触れる際に,感性や認知の面での効果は無視できない [7].人にどのような印象を感じさせるかということは技術者が軽視しがちな点であり,一般人に強く訴えかける重要な点である.人体構造に学ぶロボット構成法は,人間らしい自然な動きが期待でき,適切にデザインされることによって違和感のない印象を与えることができる方法論の一つであると考えられる.
2.3 これまでの取り組み
筆者のグループを含め,人体構造に示唆を得たロボットの構成法・制御法の研究はいくつもの挑戦が行われている.ここではそのいくつかを紹介する.
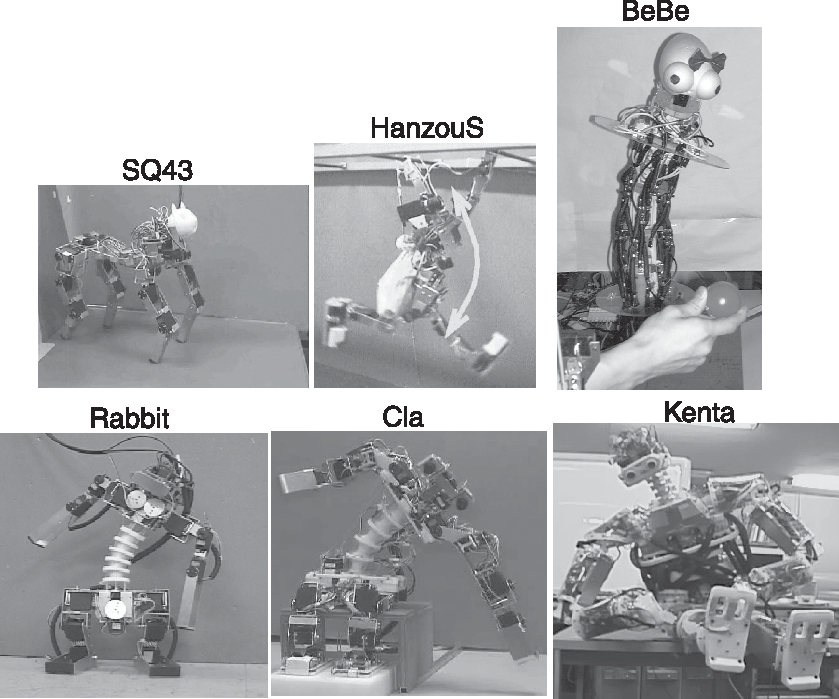
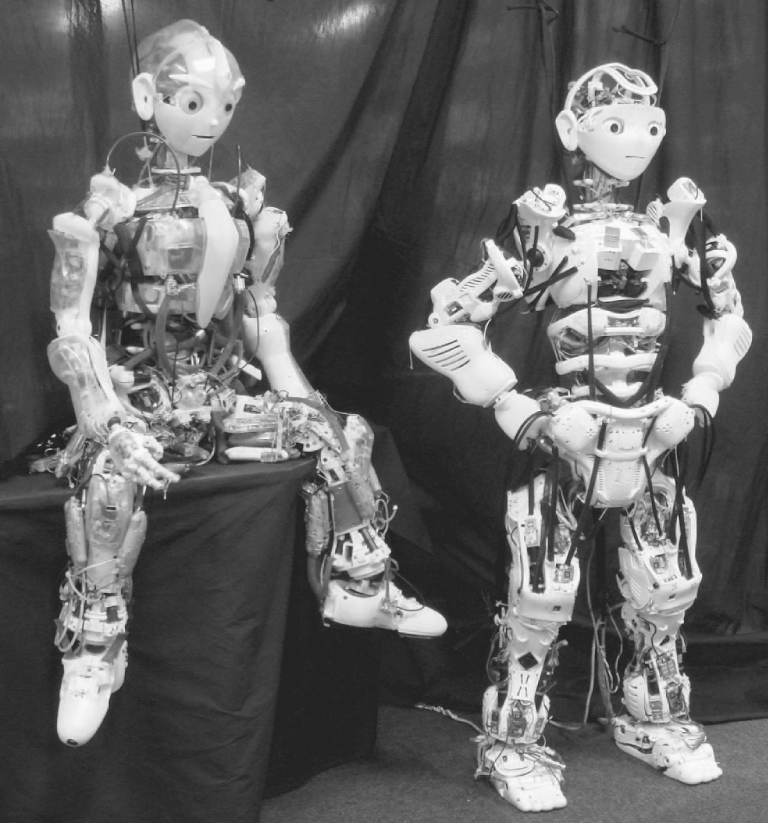
筆者のグループでは1998 年ごろから人体構造に学ぶ身体構成法制御法の研究を進めている.人体構造の中でも特に脊椎に着目し,36 本の空気圧人工筋により駆動される脊椎のみのロボット [10] や脊椎を持つ4 脚ロボット [11] から,寝返りやハイハイをする小型ヒューマノイドCla [5] や全身腱駆動ヒューマノイド腱太 [12, 13] に至る研究が博士論文 [8] にまとめられている(図 1).さらに,肩甲骨・鎖骨構造から成る肩構造 [14] や股関節構造等を人体構造に学び,全身筋骨格型ヒューマノイド小太郎 [15] および小次郎 [16] が開発された(図 2).柔軟な肩構造 [17] や全身協調運動実現法 [18] に関する博士論文が書かれている.


英国のShadow Robot Company では1990 年代前半からマッキベン式空気圧人工筋を販売し,人工筋駆動式の2 脚ロボットや多自由度ハンド(図 3)を開発している.Holland らは人体構造をできるだけ模倣するロボットの試みを行っており,CRONOS [19] やECCE (図 3)を開発している.フエスト社は出力と耐久性を重視した独自の空気圧人工筋を販売し,FESTO Humanoid Muscle-Robot を開発した.筋駆動型ではないが脊椎に関連した研究として,ベリーダンスのロボットに関する研究 [20, 21] や,腰椎・頸椎を持つ2 脚ロボットの複合制御の研究 [22] なども行われている.近年では,2 脚歩行する空気圧人工筋駆動ロボット [23] や柔軟な脊椎構造を有する筋骨格系赤ちゃんロボット [24] も開発され,匍匐行動の学習による獲得 [25] 等の研究が行われている.
人間の身体構造に学ぶロボットの研究は,構造の実現法も制御の実現法も研究は道半ばである.もし仮に1 人の感覚神経と運動神経にすべてアクセスできる計算機があるとしても,人の脳が実現している感覚運動処理に匹敵する計算アルゴリズムを実現する方法は明らかにされていない.
3 筋骨格ヒューマノイド小太郎・小次郎の設計と制御
本章では,人体構造に示唆を得た筋骨格型ヒューマノイドの実現例として,筆者のグループで開発したロボットの技術を説明する.
3.1 脊椎構造
多節構造の脊椎は人体で最も自由度の高い骨格構造である.1 節当たりの可動範囲は小さいが自由度は回転3 自由度並進2 自由度と言われ,骨盤から頭部まで24 節からなり120 自由度を有する [26].各節間には椎間板・靱帯・筋・腱などの受動・能動の弾性要素があり,衝突時の安全性や動きの滑らかさ・柔らかさ・自然さを実現する.椎間板や靱帯は変形すると初期位置に戻ろうとする復元力が発揮され,通常は重力に対抗する力としてアクチュエータを補助する.また多関節にまたがる筋により駆動されても一部の節に変形が集中せず分散する(図 4).
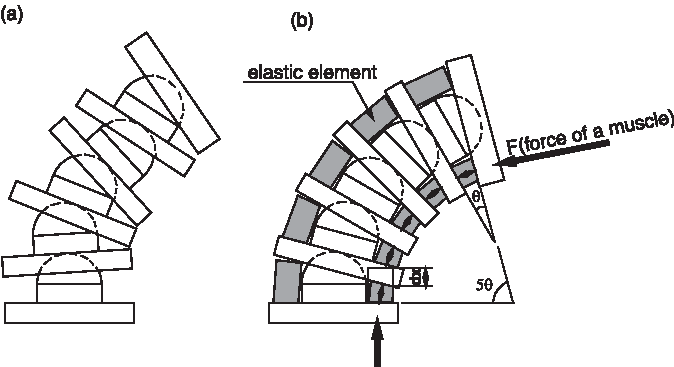
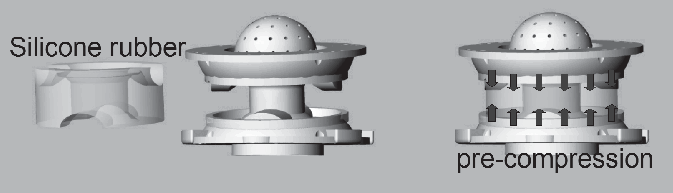
図 1 ・図 2 のロボットは,ウレタンやシリコンゴムによる椎間板や,コイルばねや天然ゴムの靱帯が,節間に埋め込まれている.受動的な柔軟性だけの脊椎 [10, 11, 27] から,5 節15 自由度を張力制御可能な筋8 本で駆動する劣駆動のCla [5],10 節30 自由度を筋40 本で駆動する腱太 [12, 13],5 節15 自由度を筋20 本で駆動する小太郎 [28],天然ゴム靱帯を持ち4 節12 自由度を筋20 本で駆動する小次郎 [29] まで,試行錯誤を経て可動範囲と姿勢の滑らかさを損なわない最小限の構成に変化してきている.なお,腱太・小太郎・小次郎の脊椎はS 字湾曲 [26] を再現しているが,これは脊椎の軸を体幹の中心からずらすことで胸郭を広くするとともに,人間に似せる効果も狙っている.
3.2 鎖骨・肩甲骨
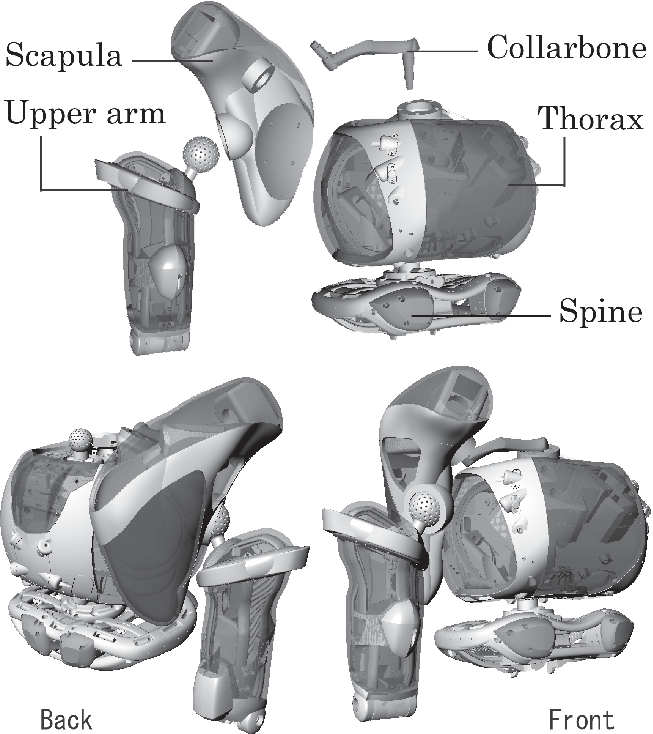
球関節は3 自由度をコンパクトに実現できる利点があるが,軸回りのねじり1 自由度を除く曲げ2 自由度は可動範囲が比較的小さいという欠点がある.肩甲骨と鎖骨を持つ人間の肩の構造は,球関節である肩関節の回転中心を胸郭から見て移動可能にすることで,手先の到達範囲を広くする効果がある.岡田らによるサイバネティック・ショルダ [30] も人間の肩の動きを模した機構である.肩甲骨・鎖骨を用いると,肩関節の手前の可動構造を胸郭の外部に設けることができ,胸郭内部にアクチュエータ等を埋め込むスペースを取ることができるという利点もある [31].
人間の肩甲骨は肩関節と鎖骨との間の関節はあるが,体幹と接続する関節がなく,筋肉と肉に支持され肋骨背面上を滑るように動く.小太郎の肩構造 [31] は人間の構造を忠実に模倣したために,自由度が過大で姿勢を一意に制御することが難しかった.小次郎の肩構造では,胸郭を球状にし,肩甲骨がその球面に沿って動くように自由度を限定することで(図 6),姿勢の制御性が大幅に向上した [14].人間の肩甲骨の動きも,ほぼ胸郭に沿った動きである.
3.3 腱駆動の関節角度⇔筋長計算方法
腱駆動ロボットは関節角度とアクチュエータ状態が1 対1 に対応していない.ある関節角度を実現するための筋長(逆運動学)は筋の幾何学的な経路を計算することで計算できるが,筋の長さから現在の関節角度を計算すること(順運動学)は難しい.関節角度と筋長の関係は,関節角θ と筋長 l の間のヤコビ行列Jm(δl = Jmδθ) により記述され,この疑似逆行列Jm# を用いて微小ずつ関節角を変化させて(δθ = Jm#δl),繰り返し計算により求める方法やニューラルネットを用いる方法 [8, 32],事前に作成しておいた逆運動学(関節角度→筋長)の計算結果表中の最もマッチするエントリを探索する方法 [33] 等により順運動学の計算を行う方法が提案されている.
3.4 物理剛性調節可能機構
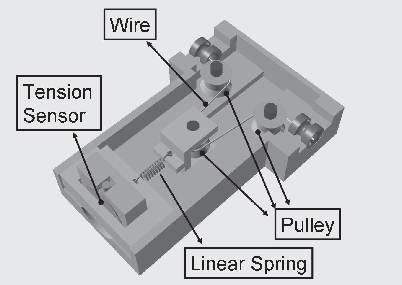
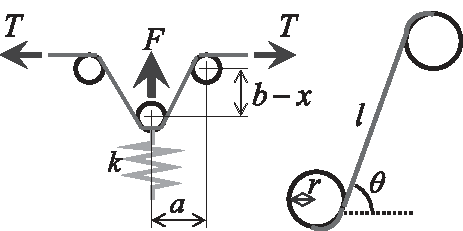
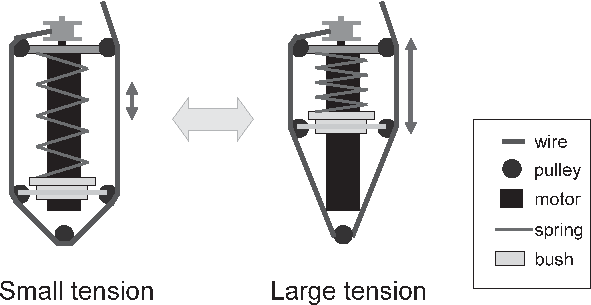
拮抗する腱駆動の場合,筋の剛性Km を変えることで関節剛性Kj を調節することができる [34].前節のヤコビ行列Jm を用いて,仮想仕事の原理からKj = JmTKmJm と導くことができる.図 7右図のような,筋張力によって見かけの筋剛性が変わる非線形ばねの構造を用いれば,筋剛性Km を張力によって変えることができ,その結果関節剛性を調節することができる [35].
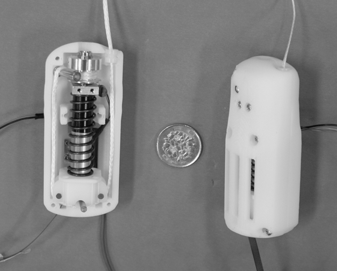
剛性調節機構のロボットへの組み込みを可能にするために,ユニット化した非線形ばね要素を設計し,小次郎の腕部や後述のウェアラブル操縦デバイスに組み込んだ(図 7[36],図 8[37]).図 8はモータの軸を可動プーリとすることでコンパクトなユニットを実現した.図 7,図 8ともに,張力が大きくなると剛性が高くなる.
3.5 力提示可能なウェアラブル操縦デバイス
筋骨格型ヒューマノイドのアクチュエータをユニット化することは,設計の省力化もあるが,筋増強可能 [38] にするという目的があった.従来設計時に確定しなければならなかったアクチュエータ仕様を,完成後に自由に調整できるというコンセプトである [9].
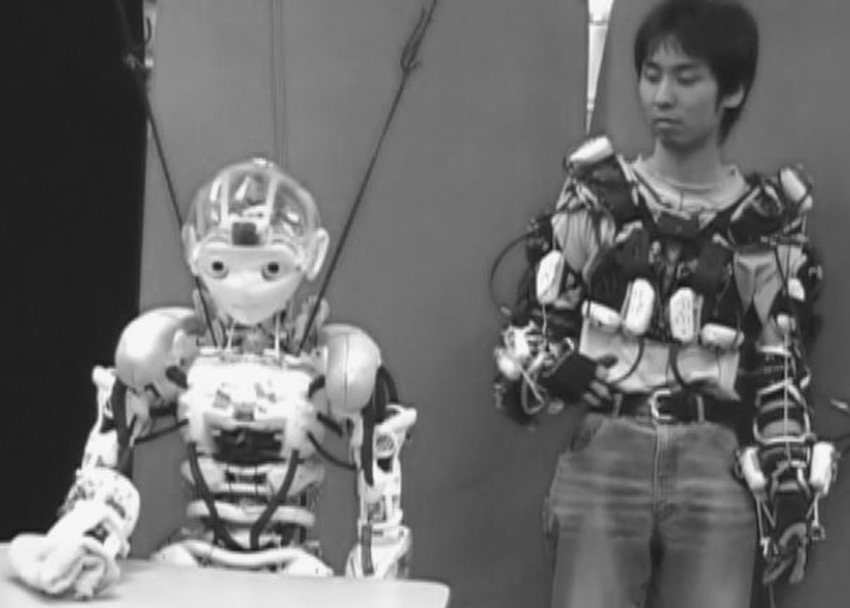
小太郎・小次郎の筋ユニットは張力センサを内蔵し,1 [kHz] の制御周期で張力を制御可能である.張力目標値を一定にした張力制御は,長さが自動的に変化するため,筋骨格型ロボットの姿勢や動作の教示に用いられてきた [13].この筋ユニットを使ってウェアラブルな操縦デバイスを開発した(図 9)[39, 40].これは,ラクロスのプロテクターに筋ユニットを各関節をまたぐように配置し,脊椎・両腕で合計24 個のユニットを取り付けたものである.すべてのユニットを与えられた目標張力を維持するように制御すると,装着者の姿勢変更に応じて各筋ユニットの長さが自動的にフィットするように変わる.各筋ユニットの長さ情報から装着者の関節姿勢を推定しロボットの関節姿勢目標値として与えることで,ロボットを操縦することができる.
逆にロボットのセンサからの情報により得られるロボットが環境から受ける力に応じて,筋ユニットの目標張力を修正することで,装着者にロボットが受けている力を感じさせることができる.これにより,図 9左のようにロボットがテーブルを拭くような動作の際に,テーブルからの反力や摩擦力を操縦者に提示することができる.姿勢の教示だけでなく力覚を含めた教示が可能になるのである.
3.6 筋骨格型ロボットの運動実現
筋骨格型ロボットの運動実現法の研究は,通常のロボットのように関節角度の時系列で記述された運動(目標)に沿うように制御するものと,学習や探索により実現しようというものが主に行われてきている.
関節角度時系列をベースとする場合は,3.3節に述べた関節角度から筋長を求める方法により,目標筋長時系列に変換し,各筋を各瞬間に目標長さになるように制御する.この手法は筋経路の誤差や筋の伸び等によりあまり精度は実現されない.関節角度や手先位置の精度が必要な場合は,関節角度や手先位置を計測するセンサを取り付け,そのフィードバックを用いることが必要となる.
学習や探索による方法は人体に学んだロボットに向いているように感じられるが,様々な試行錯誤が行われている段階であり,確立された手法はまだない状況である.研究例には,初期動作列のGA により修正することで実現する手法 [41, 42] による匍匐動作の獲得や,センサ情報を入力しアクチュエータ状態を出力するニューラルネットをGA で修正することで感覚主導型の動作を実現する手法 [32] によるブランコ運動の実現,反射的足踏みの実現 [43] やそのパラメータ調整の過程を観察・模倣・自動化することによる手法 [44],力の加え方の実機で試行錯誤による自転車こぎ [45] や踏み出し動作 [44] の実現等がある.成岡らによるCPG をオンラインで最適化することによる空気圧人工筋駆動の筋骨格型ロボットの匍匐動作 [25] 等も実現されている.
3.7 筋骨格ヒューマノイドのその他の構成要素
筋骨格型ロボットは3 自由度球関節の姿勢の計測が難しい.これまでに,交代磁場を用いた角度センサ [46] 等が提案されてきたが,筋骨格ヒューマノイド小太郎・小次郎では,携帯電話用の小型カメラと小型プロセッサにより球関節の球面上の模様を観察・追跡することで,3 軸角度を推定する方式を考案した [47].
100 以上のアクチュエータとデータ数としては500 以上のセンサとの入出力がある超多自由度筋骨格型ヒューマノイドでは,これらの情報の取り扱いに工夫が必要である.基本的な思想は,体内に分散する小型プロセッサでリアルタイムなセンサ情報収集とアクチュエータ制御を行い,制御周期より遅い間隔で定期的に中央処理系との通信を行うという方式である [48].36 [mm] ×46 [mm] の基板で,定常1.5 [A]DC モータ×4,定常5 [A]DC モータ×2,定常6 [A]AC モータ×2 の,3 種類の基板を開発し,小型のUSB ハブ基板を用いてツリー状に接続する [49].
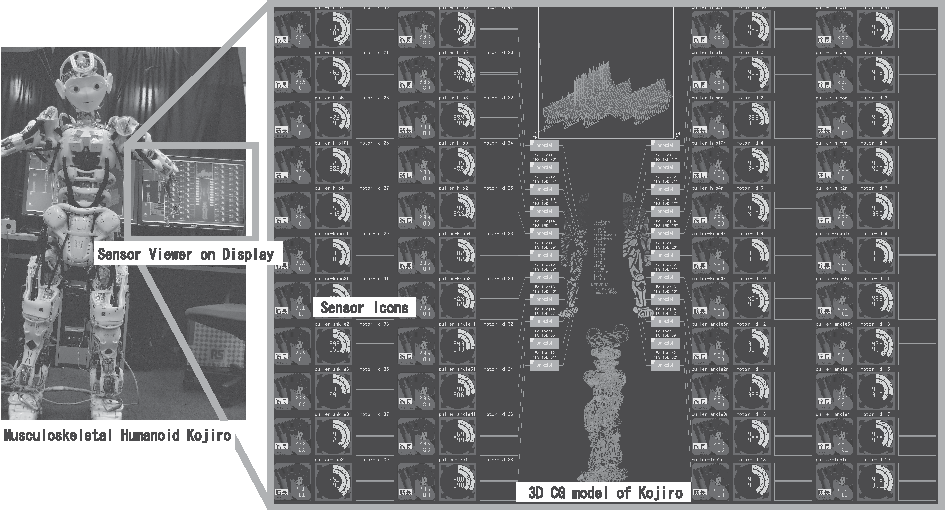
また,全センサ・アクチュエータ・基板の様子を可視化するシステムは不調箇所の発見や事故防止に不可欠であり,図 10のような可視化システムを開発して用いている [50].
ロボットはモータの出力重量比が非常に重要である.定格出力以上の出力状態を継続するとモータが破損するが,小次郎はモータ破損を防ぎつつ定格以上の出力を発揮するために,モータの巻線温度推定に基づく電流制限を行っている [51].これにより短時間であれば非常に大きな出力をするこが可能になった.
最後に,小太郎・小次郎の設計の実際に軽く触れておきたい.人間の骨格を文献 [26] 等に学び,ある程度模倣した形状の骨格を設計するには3D モデリングソフトウェアは不可欠であり,我々はRhinoceros を用いた.造形にはABS よりは強度のあるナイロン樹脂でSLS 法によるラピッドプロトタイピング造形を多用した.寸法精度の必要なモータとの接続箇所等は,通常の機械加工により制作した.設計過程では部位ごとに分担し,定期的にプロジェクタに3D-CAD ソフトを提示して軽量化と最適化の議論を徹底的に行った.配線や排熱さらに組み立て時のねじ回しの経路の有無まで議論しながら設計を進めた集大成が筋骨格ヒューマノイド小太郎・小次郎である.
4 おわりに
人体構造に示唆を得た筋骨格型ヒューマノイドの研究を,シーズとしての可能性や人体構造に学ぶことの意義に関し筆者の考えを述べ,これまでに行われてきた取り組みの紹介と実現の例として筋骨格ヒューマノイド小太郎・小次郎の構成と設計を解説した.人間の身体の性能には及ばないが,将来ロボットが人間の生活の場で活動するようになるためには,現在のロボットの延長ではない,人間の柔らかさ・しなやかさからアプローチするロボット技術が重要になってくると考えている.
これまでの,ロボットや機械の設計・制御の基本であった剛性と精度からあえて離れ,人間の設計と制御のパラダイムを考える,言わばアニーリングのような研究であるかもしれない.感覚に基づく自己モデルを自動形成する能力や,基本行動原理を与えれば評価指標を自ら生成し学習を行う能力を実現できれば,人体のように複雑性・不確定要素を前提とする機械システムが可能になり,機械の設計・制御のパラダイムを転換する方法論になる可能性がある.
謝辞
本稿に解説した筋骨格型ヒューマノイド研究にともに携わってきた,稲葉雅幸教授をはじめとする東京大学情報システム工学研究室のメンバーに感謝する.
参考文献
[1] 水内:“人間の筋骨格構造を規範としたヒューマノイドロボット”,設計工学,vol.40, no.9, pp.459–467, 2005.
[2] 広瀬,佐藤:“多自由度ロボットの干渉駆動”,日本ロボット学会誌,vol.7, no.2, pp.20–27, 1989.
[3] 特集「ソフトロボティクス」,日本ロボット学会誌,vol.17, no.6, 1999.
[4] G. Pratt and M. Williamson: “Series Elastic Actuators,” Proceedings of the 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’95), vol.1, pp.399–406, 1995.
[5] I. Mizuuchi, S. Yoshida, M. Inaba and H. Inoue: “The Development and Control of the Flexible-Spine of a Human-Form Robot,” Advanced Robotics, vol.17, no.2, pp.179–196, 2003.
[6] 特集「ロボティック・サイエンス」,日本ロボット学会誌,vol.28, no.4, 2010.
[7] 特集「ロボットデザイン」,日本ロボット学会誌,vol.22, no.8, 2004.
[8] 水内:柔軟性可変な脊椎構造を有する多自由度全身行動ロボットシステム,博士論文,東京大学,2002.
[9] I. Mizuuchi, T. Yoshikai, Y. Nakanishi, Y. Sodeyama, T. Yamamoto, A. Miyadera, T. Niemel・ M. Hayashi, J. Urata and M. Inaba: “Development of Muscle-Driven Flexible-Spine Humanoids,” Proceedings of IEEE-RAS International Conference on Humanoid Robots (Humanoids2005), pp.339–344, 2005.
[10] 川島,水内,山口,加賀美,稲葉,井上:“空気圧人工筋を用いた冗長性をもつ脊椎型ロボット”,日本機械学会ロボティクス・メカトロニクス講演会’99 講演論文集JSME,pp.2A1–47–081, 1999.
[11] 松木,水内,加賀美,稲葉,井上:“柔軟な脊椎機構を持つ四脚歩行ロボットの動作生成と行動制御”,日本機械学会ロボティクス・メカトロニクス講演会’99 講演論文集,pp.1P2–42–063, 1999.
[12] M. Inaba, I. Mizuuchi, R. Tajima, T. Yoshikai, D. Sato, K. Nagashima and H. Inoue: ‘Building Spined Muscle-Tendon Humanoid,’ Robotics Research: The Tenth International Symposium (eds. by R. A.Jarvis and A.Zelinsky), springer tracts in advanced robotics 6. pp.113–130, Springer Verlag, 2003.
[13] I. Mizuuchi, R. Tajima, T. Yoshikai, D. Sato, K. Nagashima, M. Inaba, Y. Kuniyoshi and H. Inoue: “The Design and Control of the Flexible Spine of a Fully Tendon-Driven Humanoid “Kenta”,” Proceedings of the 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.2527–2532, 2002.
[14] Y. Sodeyama, T. Nishino, Y. Namiki, Y. Nakanishi, I. Mizuuchi and M. Inaba: “The designs and Motions of a Shoulder Structure with a Spherical Thorax, Scapulas and Collarbones for Humanoid “Kojiro”,” Proceedings of The 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.1465–1470, 2008.
[15] I. Mizuuchi, T. Yoshikai, Y. Sodeyama, Y. Nakanishi, A. Miyadera, T. Yamamoto, T. Niemel・ M. Hayashi, J. Urata, Y. Namiki, T. Nishino and M. Inaba: “Development of Musculoskeletal Humanoid Kotaro,” Proceedings of the 2006 IEEE International Conference on Robotics and Automation, pp.82–87, 2006.
[16] I. Mizuuchi, Y. Nakanishi, Y. Sodeyama, Y. Namiki, T. Nishino, N. Muramatsu, J. Urata, K. Hongo, T. Yoshikai and M. Inaba: “An Advanced Musculoskeletal Humanoid Kojiro,” Proceedings of the 2007 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2007), 2007.
[17] 袖山:筋骨格型ヒューマノイドにおける多自由度柔軟肩構造の開発と行動実現研究,博士論文,東京大学,2009.
[18] 中西:超多自由度冗長筋骨格ヒューマノイドの全身協調運動実現システムの構成法,博士論文,東京大学,2009.
[19] O. Holland and R. Knight: “The Anthropomimetic Principle,” Proceedings of the AISB06 Symposium on Biologically Inspired Robotics, 2006.
[20] J. Or: “A Control System for a Flexible Spine Belly-Dancing Humanoid,” Artif Life, vol.12, no.1, pp.63–87, 2006.
[21] J. Or: “Towards the Development of Emotional Dancing Humanoid Robots,” International Journal of Social Robots, vol.1, no.4, pp.367–382, 2009.
[22] 下田,木村:“複合制御での制御を前提とした腰椎,頸椎機構の開発”,日本機械学会ロボティクス・メカトロニクス講演会’07 講演論文集,pp.1P1–C11, 2007.
[23] K. Narioka, S. Tsugawa and K. Hosoda: “3D Limit Cycle Walking of Musculoskeletal Humanoid Robot with Flat Feet,” Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.4676–4681, 2009.
[24] 成岡,新山,細田,國吉:“柔軟な脊椎構造を有する筋骨格系赤ちゃんロボットの開発”,日本機械学会ロボティクス・メカトロニクス講演会’09 講演論文集,pp.2A1–F20, 2009.
[25] 成岡,細田:“筋骨格赤ちゃんロボットのロコモーション獲得”,第27 回日本ロボット学会学術講演会予稿集CD-ROM,AC3S1–04, 2009.
[26] I. A.Kapandji :カパンディ関節の生理学III 体幹・脊柱.医歯薬出版株式会社,1986.
[27] 小屋迫,金広,水内,稲葉,井上:“脊椎構造を持つ人間型ロボットシステムの開発”,日本機械学会ロボティクス・メカトロニクス講演会’98 予稿集,pp.1CI1–6, 1998.
[28] 並木,山本,吉海,水内,稲邑,稲葉:“粘性・弾性要素による基本姿勢への復元力を有する関節機構”,第23 回日本ロボット学会学術講演会予稿集CD-ROM,3E34, 2005.
[29] 並木,中西,浦田,袖山,水内,稲葉:“筋骨格ヒューマノイド小次郎の背骨,骨盤からなる体幹構造の設計と実装”,第25 回日本ロボット学会学術講演会予稿集CD-ROM,2H24, 2007.
[30] 岡田,中村:“サイバネティック・ショルダの開発—人間の肩の動きを模倣した3 自由度機構—”,日本ロボット学会誌,vol.18, no.5, pp.690–698, 2000.
[31] Y. Sodeyama, T. Yoshikai, T. Nishino, I. Mizuuchi and M. Inaba: “The Designs and Motions of a Shoulder Structure with a Wide Range of Movement Using Bladebone-Collarbone Structures,” Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.3629–3634, 2007.
[32] I. Mizuuchi, T. Yoshikai, D. Sato, S. Yoshida, M. Inaba and H. Inoue: “Behavior Developing Environment for the Large-DOF Muscle-Driven Humanoid Equipped with Numerous Sensors,” Proceedings of the 2003 IEEE International Conference on Robotics & Automation, pp.1940–1945, 2003.
[33] Y. Nakanishi, K. Hongo, I. Mizuuchi and M. Inaba: “Joint Proprioception Acquisition Strategy Based on Joints-Muscles Topological Maps for Musculoskeletal Humanoids,” Proceedings of the 2010 IEEE International Conference on Robotics and Automation, pp.1727–1732, 2010.
[34] N. Hogan: “Adaptive Control of Mechanical Impedance by Coactivation of Antagonist Muscles,” IEEE Transactions on Automatic Control, vol.AC-29, no.8, pp.681–690, 1984.
[35] 兵藤,小林:“非線形バネ要素を持つ腱制御手首機構の研究”,日本ロボット学会誌,vol.11, no.8, pp.1244–1251, 1993.
[36] 村松,吉田,水内,稲葉雅幸:“関節剛性調整可能な筋骨格システムのためのコンパクトな非線形ばねユニットの設計”,第25 回日本ロボット学会学術講演会予稿集CD-ROM,2H22, 2007.
[37] 吉田,村松,水内,稲葉:“筋骨格システムのためのコンパクトなモータ一体型剛性調整機構の設計”,日本機械学会ロボティクス・メカトロニクス講演会’08,2A1-H12, 2008.
[38] I. Mizuuchi, H. Waita, Y. Nakanishi, T. Yoshikai, M. Inaba and H. Inoue: “Design and Implementation of Reinforceable Muscle Humanoid,”
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.828–833, 2004.
[39] 本郷,吉田,中西,水内,稲葉:“筋型アクチュエータモジュールによるバイラテラル型ウェアラブルロボット操縦デバイスの開発”,日本機械学会ロボティクス・メカトロニクス講演会’09 講演論文集,pp.1P1–F07, 2009.
[40] K. Hongo, M. Yoshida, Y. Nakanishi, I. Mizuuchi and M. Inaba: “Development of Bilateral Wearable Device “Kento” for Control Robots using Muscle Actuator Modules,” 18th IEEE International Symposium on Robot and Human Interactive Communication, pp.897–902, 2009.
[41] 水内,松木,稲葉,井上:“柔軟脊椎構造を持つ四脚ロボットのGA による動作生成”,第17 回日本ロボット学会学術講演会予稿集,pp.199–200, 1999.
[42] 吉田,水内,稲葉,國吉,井上:“脊椎構造を持つ人間型ロボットにおけるGA による匍匐動作の自動獲得”,日本機械学会ロボティクス・メカトロニクス講演会’02 講演論文集,pp.2P2–L04, 2002.
[43] 本郷,中西,並木,水内,稲葉:“筋骨格多自由度ヒューマノイド小次郎の脚部による足首6 軸力センサを用いた反射的足踏み行動の実現”,第25 回日本ロボット学会学術講演会予稿集CD-ROM,3H26, 2007.
[44] 小林,中西,本郷,白井,水内,稲葉:“筋骨格多自由度ヒューマノイドの試行錯誤的学習による踏み出し動作の実現”,第27 回日本ロボット学会学術講演会予稿集CD-ROM,AC1S1–01, 2009.
[45] Y. Nakanishi, I. Mizuuchi, T. Yoshikai, T. Inamura and M. Inaba: “Pedaling by a Redundant Musculo-Skeletal Humanoid Robot,” Proceedings of IEEE-RAS International Conference on Humanoid Robots (Humanoids2005), pp.68–73, 2005.
[46] 陰山,長嶋,山口,加賀美,稲葉,井上:“交代磁場を用いた球ジョイントの3 軸角度検出センサ回路”,日本機械学会ロボティクス・メカトロニクス講演会’00 講演論文集,pp.2A1–54–068, 2000.
[47] J. Urata, Y. Nakanishi, A. Miyadera, I. Mizuuchi, T. Yoshikai and M. Inaba: “A Three-Dimensional Angle Sensor for a Spherical Joint Using a Micro Camera,” Proceedings of the 2006 IEEE International Conference on Robotics and Automation, pp.4428–4430, 2006.
[48] 金広,水内,垣内,稲葉,井上:“体内LAN による神経系を持つリモートブレインロボットの開発”,第15 回日本ロボット学会学術講演会予稿集,pp.1023–1024, 1997.
[49] 宮寺,水内,稲葉:“超多自由度ヒューマノイドのための感覚動作制御通信システム”,第23 回日本ロボット学会学術講演会予稿集CD-ROM,1E35, 2005.
[50] 中西,並木,西野,浦田,水内,稲葉:“超多自由度筋骨格ヒューマノイドのためのセンサ情報統合可視化システム”,日本機械学会ロボティクス・メカトロニクス講演会’08 講演論文集,pp.2A1–D05, 2008.
[51] J. Urata, T. Hirose, N. Yuta, Y. Nakanishi, I. Mizuuchi and M. Inaba: “Thermal Control of Electrical Motors for High-Power Humanoid Robots,” Proceedings of The 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.2047–2052, 2008.


