本ページでは,これまでに日本ロボット学会誌に掲載された解説記事の中から注目度の高い記事をHTML形式で紹介しています.HTMLへの変換時に著者紹介,キーワードなど一部の情報は省略しています.また,レイアウトはオリジナル記事とは異なります.
PDF形式のオリジナル記事はこちらでご覧になれます.引用する際は,本Webページではなくオリジナル記事を引用してください.
1 はじめに
全方向移動とは,前後や左右だけでなく,斜め方向,その場旋回など,任意の方向に移動する運動を指す.本解説においては,全方向移動を実現する機構のなかでも,歩行方式,節関方式,ホバーおよび飛行方式は省き,移動環境は床面・地面であり,車輪やクローラ方式,もしくはこれらの組み合わせ方式に絞って説明していく.全方向移動を実現する機構は非常に多岐に渡る.
2 全方向移動
2.1 ステアリング方式
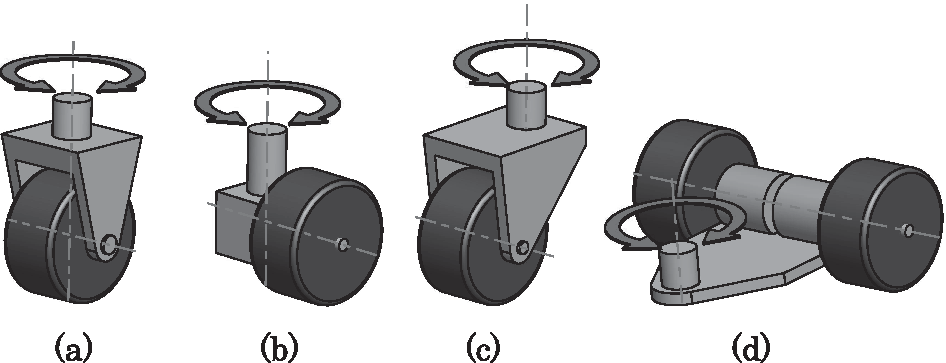
真上にステアリング方式やステアリング軸が車軸からオフセットした方式,また,二つの車輪ユニットからステアリング軸がオフセットした位置に付く方式など,いくつかある(例えば文献 [1, 2])(図1).これらのなかで,駆動輪の向きそのものを変える方式は,向きを変える時間を有するが,向きを変える時間を必要としないホロノミックなものも構成されている(例えば文献 [3, 13]).
2.2 受動回転ローラを有する車輪・クローラ・円板構造
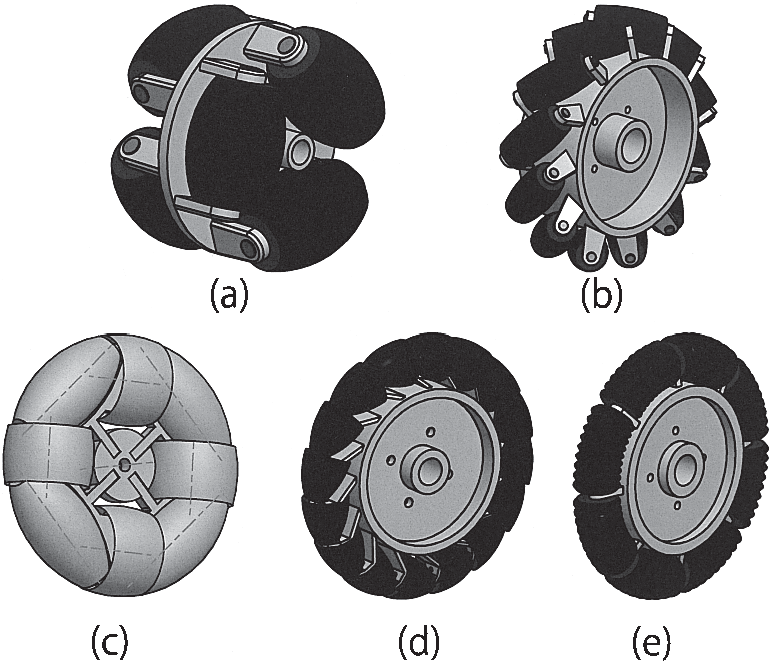
図2 に示すように,複数個の受動回転ローラを円周上に配置する方式であり,Omni-Wheel として最もよく用いられているものである [3].また,受動車輪の軸をらせん状に配置したメカナムホイール [4] や,受動車輪の形がコーン上のもの [5],入れ子状のもの [7],また,ローラではないがチューブを受動回転させるものも考えられている [6].
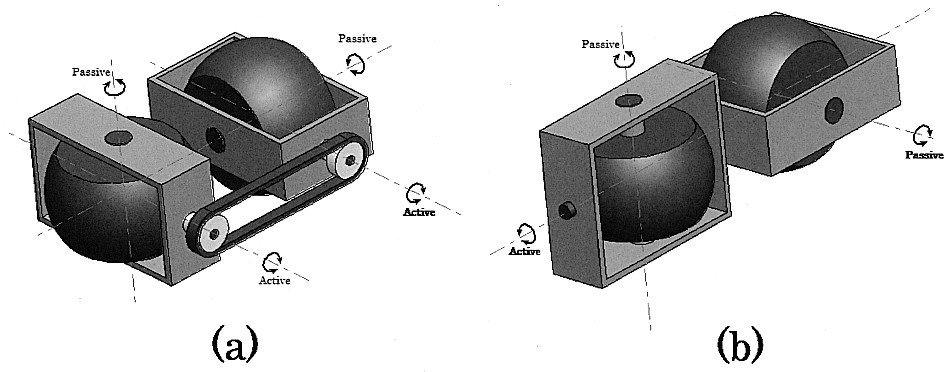
また,図3 に示すように,球体を二つに分割して,位相をずらして左右に配置した例がある [10].また,左右だけでなく,前後に二つのローラを配置した形式も研究されている [11].
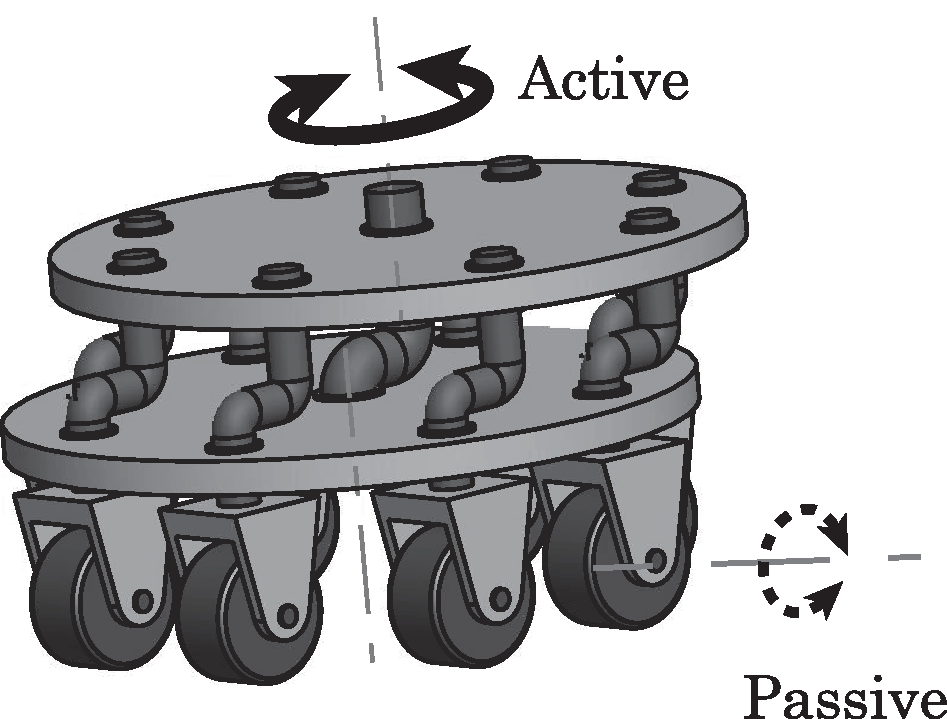
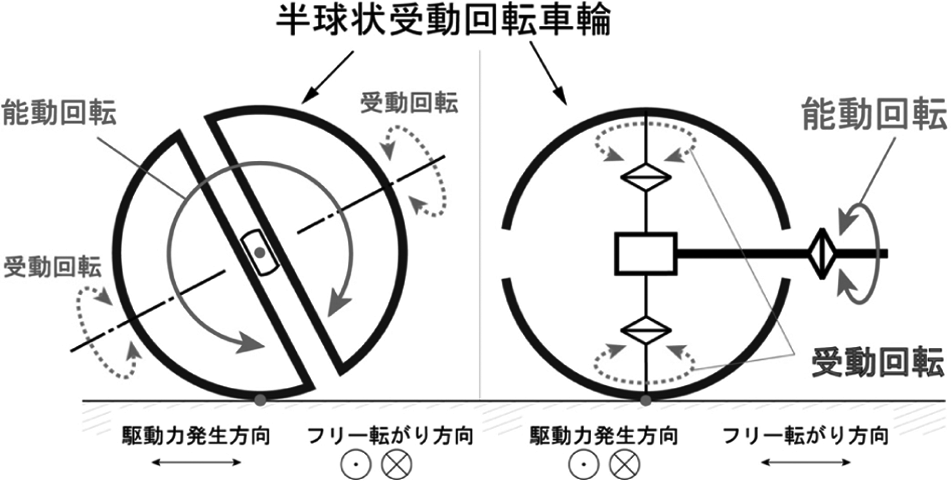
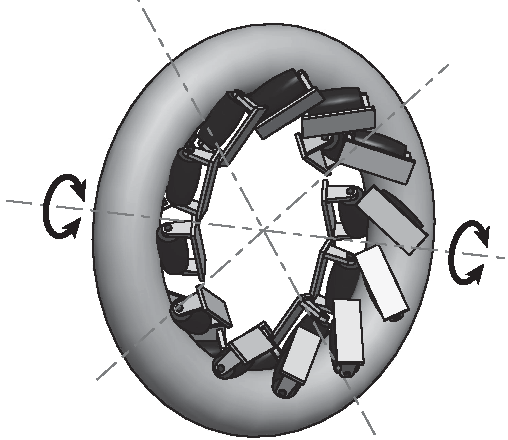
筆者らが提案・研究している球状全方車輪(図6)も広義では本項の分類の一つと言えるであろう.すなわち,球体の分割を外側で行うか内側で行うか,それに伴い支持方式を外側・内側のどちらで行うかということがポイントとなる.球状全方向車輪は,回転軸を共有する二つの向かい合わせの半球状の受動回転車輪と,これらの半球状車輪全体を回転させる機構全体における中心を射抜く能動軸とで構成される [18].球状全方向車輪において,半球状車輪の径は車輪モジュール全体の径と同じであるため,従来の全方向車輪と比較して,高い段差踏破能力を有する.また,半球状車輪を能動的に回転させる方式も構成可能であるが,走行面と半球車輪回転軸との間の接触角に応じて,回転数を調整する必要がある.
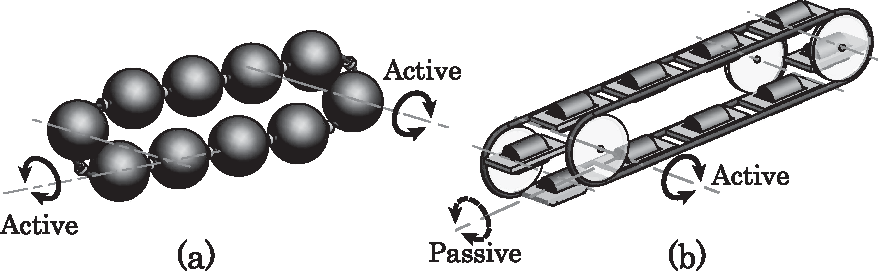
複数の車輪を搭載したクローラ方式として,西川らによる球体がついたクローラ構造がある [34] (図4 (a)).小車輪は球形状をしており,これらも駆動力を有する.駆動力を出す上で,後述の2.5 節にも属するが,クローラ構造という括りで,本項に記載しておく.また,広瀬らによるVUTON クローラ構造 [17] は,円筒状のローラゆえに,走行面に対して,線接触を行い,これにより,耐荷重性を著しく高めることに成功している [15] (図4 (b)).また,オフロード走行用に研究開発されているものもある [16].図5 に示す円盤状の機構も研究開発されている [17].Omni-Disc とよばれる円盤状の傾き角を能動的に変えることで,段差踏破能力を高めることも行われている.
2.3 摩擦駆動球方式
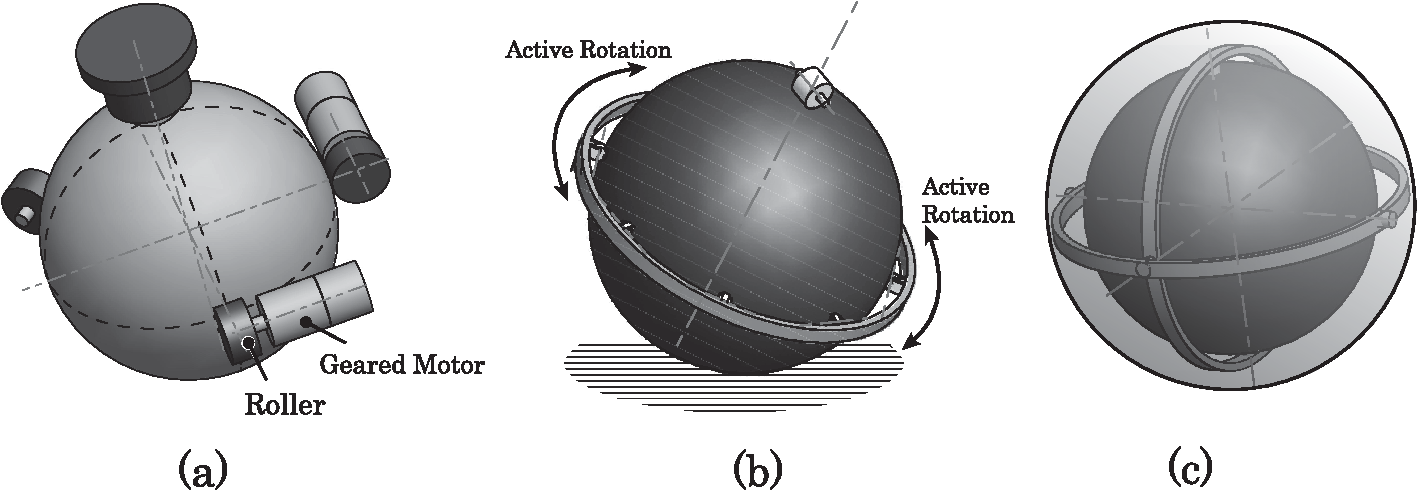
球をローラによる摩擦で駆動させる方式である(図7 (a), (b)).もっともよく用いられる方式は,以前からあるボールマウスのエンコーダ部をモータに取り替えて能動的に回転させたものである [20, 21, 22].この方式は,基本的に球一つに対して,二つの摩擦駆動ローラを有するものであるが,臼井らの方式は球一つに対して,アクチュエータ一つですむように,配置を工夫してある [19].球自体が3 個であろうが,4 個であろうが構成可能な方式であり,アクチュエータからの駆動は,ローラでも車輪間距離の確保のためのベルトでもどちらでも構わない.また,移動ベースを構成する上で,球を複数個用いるのが前提だとして,前述の一つの球体に対して一つのモータ,一つの方向を受動回転させているものもある.
その他,一つの球のみを用いる方式の例として,中村らによるBBR[23],CMU のBallbot[24],熊谷らによる玉乗りロボット [25] が挙げられる.また,球体の内部に駆動機構が搭載されているものも多数存在する(例えば文献 [26],図7 (c)).これらは,基本的に前述した玉乗り型において,球殻の内外が反転したものだと考えればよい.いずれにせよ,摩擦を用いて動力を伝達しているものである.
以上の摩擦駆動球方式においてのポイントは,地面が球状になったと考えると,ステアリング方式などすべての車輪・クローラ移動機構を「入力用の駆動機構」として用いることが可能である.しかしながら,すべてが摩擦伝動であることを考慮しなければならない.しかしながら,次の欠点があると考えられる.
摩擦駆動であるがゆえに,路面の凹凸があった場合,また,砂やごみ,濡れた走行面では水が表面についた場合は,駆動力を伝達するのが著しく困難になると考えられる.車輪表面の摩耗により駆動力が変動しやすいという問題もある.摩擦駆動であるため,グローサを付けることが非常に困難である.よって,非常に綺麗さを保つ屋内の床面で短時間走行するならまだしも,埃・砂・水などがあり・走行面の凹凸などのある実環境で,全方向に高い走破性を維持することは非常に困難であると考えられる.
2.4 全受動輪接地式
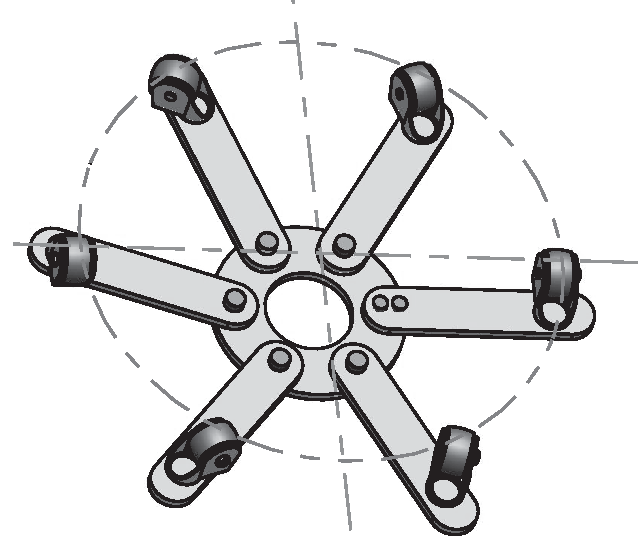
本方式として,図8 に示す六車によるトロコイド車が挙げられる [27].水上船でいうシュナイダー方式に相当するものである.また,近年でも幾何学的解析がなされている [28].
2.5 2 軸直交駆動方式
その他の全方向移動機構を本項では取り扱う.筆者らが研究開発している円形断面クローラは,円形の断面の中央に能動回転軸を有することで横方向へも移動可能である.
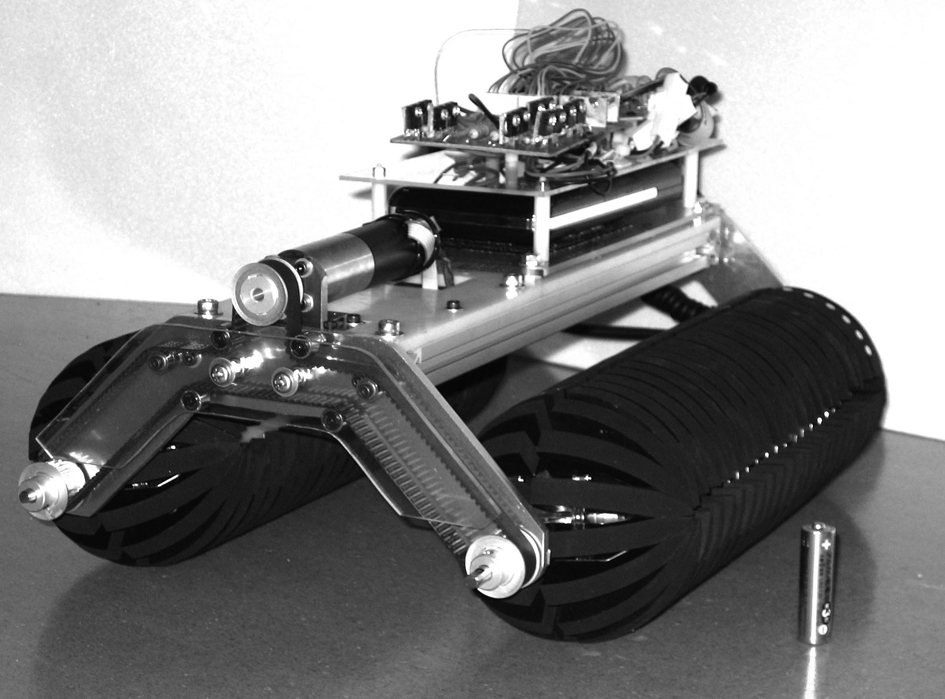
また,走行面との接触部において,2 軸の駆動力を発生する車輪構造として,複数のフリーローラを有する円板で左右から車輪を挟むものがある.例として,図9 に示すHonda による1 輪車が挙げられる [29].メカナムホイールの小車輪を能動回転させることも可能であるが,前述した摩擦駆動方式の問題はいまだに残ると考えられる.また,小森らにより,モータを向かい合わせて用いる方式も提案されている [30].これらは,複数個の小車輪を円周状に配置する方式である.筆者らは,横方向への走破能力をかんがみ,球状全方向車輪や円形断面クローラ機構(図10)の研究開発を行っている.
3 全方向駆動
3.1 2 軸直交駆動
前述した全方向移動機構を用いて,接触対象を走行面でなく,独立搬送・操作が可能な物体だとした場合を考える.全方向駆動とは,すなわち任意方向駆動であり,2 軸直交駆動がほかにも,電磁気力・静電気を用いる2 軸テーブルものなどがあるが,本項では,機械式のものを考える.すなわち,凹凸の接触を用いて駆動させるものである.
3.2 把持機構への適応
前述したすべての全方向移動機構は用いることが可能である.筆者らは,多指や平行グリッパに搭載して用いることを考えている [32].
しかしながら,複数個所が接触して初めて任意の方向に駆動力を発生するというのは,すべてが接触することが前提条件である.このすべての接触点の位置や個数を思いどおりに変化させる,すなわち制御することは,非常に困難である.また,走行面に対し,点で接触しているため,安定性もよくない.
そこで,線で接触,面で接触することで,より安定した接触および駆動力生成・付加を考える.点が離散的に散在するようにし,面に近くして機能させるという方法もある [33].
4 おわりに
以上のように,現在も,数多くの全方向移動・駆動機構が研究開発されている.このなかでも筆者らは,走破性の高さを考慮した全方向移動・駆動方式を重要視しており,実環境で動く上では,必要であると考えている.本論文が,ロボット研究者・開発者らの活動の一助となれば幸いである.
参考文献
[1] 森他:“全方向移動ロボットODV9 の基本原理と小段差乗り越えについて”,日本ロボット学会誌,vol.18, no.1, pp.150–157, 2000.
[2] H. Yu, M. Spenko and S. Dubowsky: “Omni-Directional Mobility Using Active Split Offset Castors,” ASME J. Mechanical Design, vol.126, no.5, pp.822–829, 2004.
[3] Y. Ueno, T. Ohno, K. Terashima, H. Kitagawa, K. Funato and K. Kakihara: “Novel Differential Drive Steering System with Energy Saving and Normal Tire Using Spur Gear for an Omni-Directional Mobile Robot,” 2010 IEEE International Conference on Robotics and Automation(ICRA2010), pp.3763–3768, 2010.
[4] Low vibration omni-directional wheel, Patent number: 6547340, Filing date: Dec 6, 2001, Issue date: Apr 15, 2003, Inventor: Donald Barnett Harris, Assignee: Airtrax Corporation, Primary Examiner: S.J. Morano, Secondary, Examiner: Long Bao Nguyen, Attorney: Foley & Lardner.
[5] http://www.kanto-aw.co.jp/en/
[6] Omnidirectional Wheel and Mobile Platform, Applicant: Shinichi Fuji, Inventor: Shinichi Fuji, Japanese Patent application for a patent: 2004-367219, date of application:20th, Dec, 2004, publication number: Patent disclosure2006-168659, date of publication of unexamined patent application:29th, Jun, 2006.
[7] I.E. Paromtchik, H. Asama, T. Fujii and I. Endo: “A control system for an omnidirectional mobile robot,” Proceedings of the IEEE International Conference on Control Applications and IEEE Symposium on Computer Aided Control System Design, pp.1123–1128, 1999.
[8] 淺間他:“2 台の自律移動ロボットの相互ハンドリングによる協調搬送”,日本ロボット学会誌,vol.15, no.7, pp.1043–1049, 1997.
[9] A. Yamashita, H. Asama, H. Kaetsu, I. Endo and T. Arai: “Development of OmniDirectional and Step-Climbing Mobile Robot,” Proceedings of the 3rd International Conference on Field and Service Robotics (FSR2001), pp.327–332, 2001.
[10] P. Chen et al.: “Omni-Directional Robot and Adaptive Control Method for Off-Road Running,” IEEE Trans. on Robotics and Automation, vol.18, no.2, pp.251–256, 2002.
[11] F.G. Pin et al.: “A New Family of Omnidirectional and Holonomic Wheeled Platforms for Mobile Robots,” IEEE Trans. on Robotics and Automation, vol.10, no.4, pp.480–489, 1994.
[12] 和田他:“ホロノミック全方向移動ロボットの開発”,日本ロボット学会誌,vol.15, no.8, pp.1139–1146, 1997.
[13] 和田他:“双輪キャスタ型駆動機構を用いたホロノミック全方向移動ロボット”,日本ロボット学会誌,vol.18, no.8, pp.1166–1172, 2000.
[14] 和田:“同期キャスタ駆動機構によるホロノミック全方向移動ロボットの設計と運動解析”,日本ロボット学会誌,vol.19, no.6, pp.784–792, 2001.
[15] 広瀬他:“大荷重高効率全方向車両の開発”,日本機械学会ロボティクス・メカトロニクス講演会’93 講演会論文集,pp.350–355, 1993.
[16] 磯田他:“オフロード走行用ローラ・クローラ型全方向移動ロボット”,日本機械学会論文集(C 編),vol.65, no.636, pp.3282–3289, 1999.
[17] R. Damoto, W. Cheng and S. Hirose: “Holonomic omnidirectional vehicle with new omni-wheel mechanism” IEEE International Conference on Robotics and Automation ’01, pp.773–778, 2001.
[18] K. Tadakuma: “Tetrahedral Mobile Robot with Novel Ball Shape Wheel,” The First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob 2006), pp.946–952, 2006.
[19] 山田健介,宮本共生,臼井清一:“4 個の球を用いた全方向移動機構に関する研究”,日本機械学会論文集(C 編),vol.71, no.708, pp.127–132, 2005.
[20] 特許出願2002-292490,特許公開2004-129435,発明者:和智滋明外1 名,発明の名称:搬送装置,制御方法,及び駆動機構.
[21] 特許出願平11-376192,特許公開2001-163277,発明者:井出萬盛,発明の名称:球体の回転駆動装置.
[22] 実用新案出願平8-8957,登録実用新案第3037843 号,考案者:井出萬盛,考案の名称:移動体の駆動装置.
[23] T. Endo and Y. Nakamura: “An Omnidirectional Vehicle on an Basketball,” Proceedings 12th Int’l. Conf. on Advanced Robotics, 2005.
[24] U. Nagarajan, M. Anish Mampetta, G. Kantor and R. Hollis: “State transition, balancing, station keeping, and yaw control for a dynamically stable single spherical wheel mobile robot,” IEEE International Conference on Robotics and Automation (ICRA ’09), pp.998–1003, 2009.
[25] M. Kumagai and T. Ochiai: “Development of a Robot Balanced on a Ball—First Report, Implementation of the Robot and Basic Control—,” Journal of Robotics and Mechatronics, vol.22, no.3, pp.348–355, 2010.
[26] 出願番号:特許出願2005-302480,出願日:2005 年10 月18 日,公開番号:特許公開2007-112168,公開日:2007 年5 月10 日,出願人:株式会社安川電機,発明者:岸泰生,発明の名称:球状移動装置.
[27] 六車義方:座椅子自動車,特許出願公開番号P2000-33876A,2000.
[28] 前田他:“幾何学的完全解としてトロコイド曲線を実現する機械的回転機構の提案—オムニホイールを用いない全方位移動機構—”,日本機械学会ロボティクス・メカトロニクス講演会2010 講演論文集,2A2-D11, 2010.
[29] 発明の名称:全方向移動車両,出願番号:特許出願2009-217791,出願日:2009 年9 月18 日,公開番号:特許公開2011-63204,公開日:2011 年3 月31 日,出願人:本田技研工業株式会社,発明者:竹中透.
[30] 小森雅晴,松田吉平,大橋啓生:“全方向駆動車輪に関する基礎的研究”,日本機械学会ロボティクス・メカトロニクス講演会2010 講演論文集,2A2-E10, 2010.
[31] K. Tadakuma, R. Tadakuma, H. Kinoshita, K. Nagatani, K. Yoshida, S. Peters, M. Udengaard and K. Iagnemma: “Crawler Vehicle with Circular Cross-Section Unit to Realize Sideways Motion,” IEEE/RSJ 2008 International Conference on Intelligent Robots and Systems, pp.2422–2428, 2008.
[32] 多田隈建二郎,東森充,金子真:“2 軸直交駆動力を生成する全方向駆動ローラ付指機構”,日本機械学会ロボティクス・メカトロニクス講演会2010 講演論文集,2A2-D07, 2010.
[33] 井上隆志,則次俊郎,橋本浩一,高岩昌弘:“シリコーンゴムボールを用いた面駆動型ソフトアクチュエータの開発”,日本機械学会中国四国支部第37 期総会・講演会講演論文集,pp.285–286, 1999.
[34] 西川他:“ホロノミック特性を有する全方向移動ロボットと移動ロボットの高精度誘導方式の開発”,日本ロボット学会誌,vol.13, no.2, pp.249–256, 1995.


