本ページでは,これまでに日本ロボット学会誌に掲載された解説記事の中から注目度の高い記事をHTML形式で紹介しています.HTMLへの変換時に著者紹介,キーワードなど一部の情報は省略しています.また,レイアウトはオリジナル記事とは異なります.
PDF形式のオリジナル記事はこちらでご覧になれます.引用する際は,本Webページではなくオリジナル記事を引用してください.
1 はじめに
ロボットの関節やアクチュエータの出力軸に外力を加えることで駆動系が動作する現象をバックドライブ(backdrive)と呼ぶ.「バックドライブのしやすさ」を示す概念がバックドライバビリティ(backdrivability)である.ヒトの腕は力を抜く(筋肉を弛緩させる)とブラブラの状態になる.生き物はこのような高いバックドライバビリティを容易に実現できるが,現状のロボットではなかなか難しい.
バックドライバビリティの定義や説明はこれまでいくつか行われている [1, 2] が,そのとらえ方や説明のニュアンスは資料によって微妙に異なる.また,例えば「コンプライアンス」とはどのような関係にあるのか?電磁モータ以外のアクチュエータに対してはどのように定義すべきか?バックドライバビリティを低下させるメカニズムの本質はなにか?動的なバックドライバビリティはどう扱うべきか?そもそもロボット工学において「バックドライバビリティ」という概念はどうあるべきか?等々,議論の余地は多い.本稿ではロボット設計とアクチュエータという観点から私見も交えこれらの問題について考えてみたい.
2 バックドライバビリティとはなにか
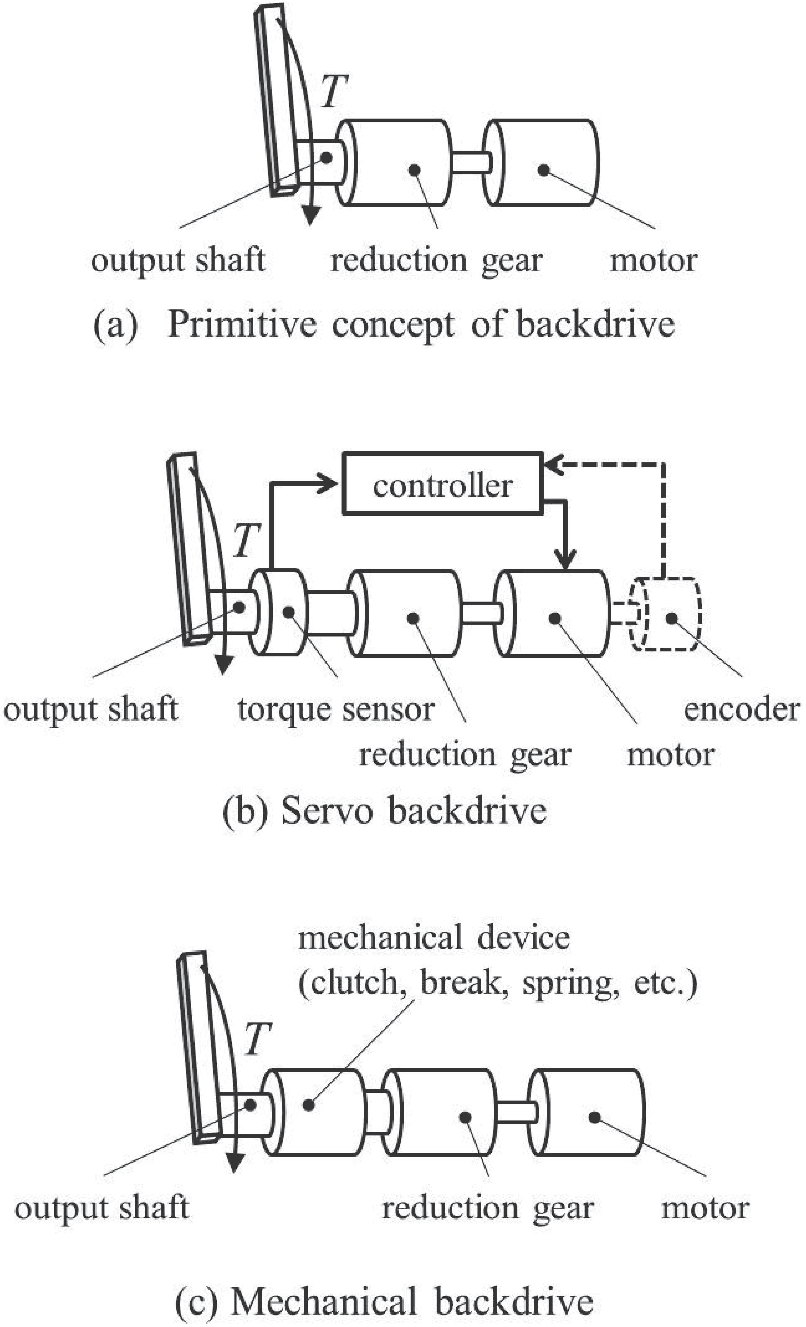
一般的なバックドライブの説明では,図1 (a) に示すような電磁モータと減速機からなる駆動系を想定し,「出力軸に外部トルクT を加えることで減速機とモータが回転する現象」がバックドライブとされる [1].この場合,バックドライバビリティを決める最大要因の一つは減速機の摩擦であるから,摩擦の少ない駆動系を機構学の立場から議論する場合にはこの定義が適切であろう.
一方ロボット工学では,バックドライバビリティという概念を用いてロボットの特性を論じる場合も多い.そのような場合には,バックドライブを単純に「外力により出力節が動作すること」と広義に解釈したほうが有益である.
広義にバックドライブをとらえると,それを実現する駆動系にはいろいろな構成がありうる.図1 (b) は,外力T をセンサで検出しこの信号をもとにモータを駆動する例である.こうすれば摩擦の大きな減速機であってもバックドライブが行える.また,同図に点線で示すようにエンコーダの情報を併用すれば,回転角,速度,加速度に依存する様々な抵抗力も実現できる.さらにもっと広い視点で考えれば,図1 (c) のように出力軸にクラッチやブレーキを使用する方法もある.クラッチをオフにすれば従動節はブラブラの状態(非常に優れたバックドライバビリティ)になるし,ブレーキを使えばバックドライブはしない.クラッチの代わりに粘性ダンパや弾性体を使えば,粘性抵抗やコンプライアンスが実現できる.ここでは,図1 (b) をサーボバックドライブ,図1 (c) をメカニカルバックドライブと呼んでおこう.
次にバックドライブに必要なトルクT について詳しく考えてみよう.一般にトルクT は駆動系の速度や加速度によっても大きく変わり,次のようにモデル化できる.

Kθは弾性抵抗を示す.K は駆動系の剛性で,その逆数がコンプライアンスである.図1 (a) のような駆動系ではこの項はほぼ0 だが,後述するように空圧アクチュエータでは大きな値をとる.c とI
とI はそれぞれ,駆動系の粘性抵抗と慣性抵抗である.これらの動的な抵抗成分もロボットの特性に大きな影響を与える.二つ例を挙げよう.
はそれぞれ,駆動系の粘性抵抗と慣性抵抗である.これらの動的な抵抗成分もロボットの特性に大きな影響を与える.二つ例を挙げよう.
ヒトの腕は,前方水平に上げた状態から脱力すると重力によってかなり速い速度で落下するが,これを現状のロボットアームで実現するのは難しい.静的には比較的良好なバックドライバビリティを示す駆動系でも,粘性項や慣性抵抗が邪魔をして速度が上がらないからである.
ロボットの転倒に伴う周囲の環境や自身へのダメージの低減効果はバックドライバビリティの効能としてしばしば取り上げられるが,実はそのような効果を期待するには,衝撃エネルギーを吸収するためにダンパ特性(粘性抵抗)を駆動系が持つ必要がある.
このように,ロボットの設計においては,静的のみならず動的なバックドライバビリティを論じる必要がある.
3 バックドライブでなにができるのか
上述のように,広義にバックドライブを捉えるとバックドライバビリティでロボットの特性を議論できる.バックドライバビリティの効能を四つの視点から例を取り上げてみよう.
第一は,「フェイルセーフ設計」である.筆者は医用内視鏡や管内検査ロボットの開発に携わったことがあるが,実用化の大きな課題の一つは,故障時にそれらを外部へ引き出せるか?という点であった.引き出すには,駆動系にバックドライバビリティを持たせることが必要である.
第二は「幾何学的順応性」である.ドアノブを持ってのドアの開閉やクランク回し作業では,手先が描くべき軌跡が決まっている.このような幾何学的制約条件のある作業対象に倣いつつ滑らかに動作するにはバックドライバビリティは欠かせない.これは「コンプライアンス」の問題として扱われることが多いが,本稿では式(1)の右辺第2 項に示したように,コンプライアンスもバックドライバビリティの一成分ととらえたい.
第三は「力学的順応性」である.マスタスレーブ方式におけるマスタアーム,手動によるロボット動作教示,バランスアーム(重量物を扱う作業において重量を補償するアーム)等では,良好なバックドライバビリティが求められる.ボーリングの投球では重力による肩関節のバックドライブを利用して,後方に持ち上げた重いボールの位置エネルギーを効率よく運動エネルギーに変換する.このように外力に対して従順な動作を行うにはバックドライバビリティが不可欠である.
第四は,「人間らしさの実現」である.ヒトのからだを抱きかかえるとき,直接支えない腰や手先や足先は重力方向に下がるが,これはヒトの関節がバックドライバビリティを持つからである.もしバックドライバビリティを持たなければ,ちょうど硬いマネキン人形を抱きかかえるようなもので,そこには人間らしさは感じられない.バックドライバビリティは,ロボットに生き物らしい柔らかな動きを与える重要なポイントとなる.
一方,逆に「低」バックドライバビリティの効能もある.
DD (ダイレクトドライブ)ロボットではアームの慣性による各関節間の干渉が生じる.肘を動かすとその反動で肩がバックドライブするので,DD ロボットでは関節間の干渉を補償する制御が必要になる.バックドライバビリティがなければこのような面倒な問題は起きない.
ヒトが膝を曲げて中腰姿勢をとると疲れるのは,膝関節が体重によってバックドライブされるのを防ぐため常に筋肉に力を入れるからである.もしヒトの膝関節がバックドライバビリティを持たなければ力を入れなくても中腰姿勢を維持できる.
以上のように,バックドライバビリティにはプラスとマイナスの両面があり,その選択はロボット全体の設計の中で行う必要がある.例えば,電動車椅子でバッテリーが上がった状況を考えてみよう.坂道でも勝手に転がり出さない特性を重視するなら,バックドライブしない走行系を設計すべきであろう.逆に,交差点で動かなくなった場合に車輪を手で回したり介助者が押して安全な位置に移動できる特性を重視するなら,バックドライバビリティを持たせるべきである.
4 アクチュエータのバックドライバビリティ
ロボット機構のバックドライバビリティを左右する最も重要な要素はアクチュエータである.アクチュエータの種類によってその特性や議論のポイントはかなり異なるので,ロボットで用いられる代表的なアクチュエータについて個別に見ていこう.
4.1 電磁モータ
電磁モータ自体が持つ,バックドライバビリティを低下させる要因は,ベアリングの摩擦,ロータ/ステータ間の磁気吸引力,ロータの慣性,等である.このうち,磁気吸引力はコイルの結線状態によって大きく変わる.無結線の状態でも永久磁石とコア間の吸引力によってコギングトルクが抵抗として働くが,短絡するとロータの回転に伴いコイルに誘導電流が流れ,これがロータの回転速度に対応した抵抗力を生む.H ブリッジ回路におけるブレーキモードはこの抵抗力を利用している.通常,電磁モータは減速機と併用するので,これらのモータ自身の抵抗力は増大され,バックドライバビリティを低下させることになる.
しかし,さらに大きな要因は減速機の摩擦である.代表的なロボット用減速機として,ハーモニックドライブ減速機,遊星歯車減速機,スパー(平歯車列)減速機,ウォーム減速機等が挙げられるが,いずれも歯車伝達を利用している.歯車伝達は本質的に二つの歯車の接触点において歯面間の滑りを伴う機構であり[3],これが摩擦抵抗を生み出す.その大きさは歯面の潤滑状態や歯形に大きく左右されるが,一般に減速比が大きいほどバックドライバビリティが低下する.300 を超える高減速比を持つ場合でもバックドライブが可能な場合が多いが,歯面や軸受に大きな負担を与えることになり,好ましい使い方ではない.
4.2 油空圧アクチュエータ
ロボット機構では,シリンダやマッキベン人工筋に代表される容積型アクチュエータが用いられる.容積型アクチュエータは,アクチュエータ内部の作動流体の容積によって変位が決まる.したがってシリンダの入出ポートを閉じてしまうと,油圧シリンダではバックドライバビリティはほぼなくなり,空圧シリンダでは空気の圧縮性に起因するコンプライアンスが生じる.また両者に共通して,流体シール部での大きな摩擦抵抗が生じる.
実際には,油空圧アクチュエータには制御バルブや流体回路が接続されるので,その状態によってバックドライバビリティは大きく変わる.
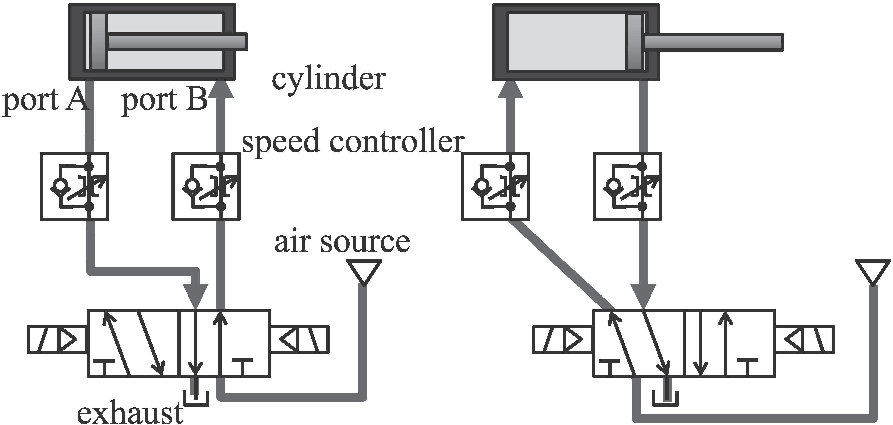
図2 は空圧シリンダの代表的な駆動回路例である.ポートA を大気圧に,ポートB を高圧源に接続するとシリンダは縮み(左図),逆にすると伸びる(右図).どちらの状態でもピストンには一定の空気圧がかかるので,バックドライブに必要な力はピストンの位置によらず圧力×受圧面積となる.また通常はシリンダの入出力ポートにスピードコントローラ(絞りの一種)を入れるので速度に応じた抵抗が生じる.つまり,式(1)右辺の第1 項と第3 項が現れる.
通常の空圧シリンダは両端点での位置決めで用いられるので上述のように高圧/大気圧の切り替え制御が行われるが,マッキベン人工筋や油圧シリンダでは,連続的に位置の制御を行うために様々な制御バルブや流体回路が用いられる.例えばポートA とポートB をそれぞれ封鎖したり(上述の例),逆に両ポートを直結したりすることができ,これによって様々なバックドライバビリティがハードウェアで実現できる.
4.3 その他のアクチュエータ
超音波モータは圧電素子の振動を利用したモータで,低速高トルクモータとしてロボットでもしばしば使われる.このモータは,圧電振動子をロータに押しつけ,その摩擦で駆動する原理を持つため,通常バックドライブしない.
静電アクチュエータや高分子アクチュエータもロボットで使われることもあるが,実例は少なくここでは省略する.
一方,マイクロ/ナノレベルの精密操作用マニピュレータや狭隘部で使うマイクロロボットでは,圧電アクチュエータやSMA (形状記憶合金)といった固体アクチュエータが用いられる.これらはそもそも動作量が非常に小さく,実用上そのバックドライバビリティが論じられることはないが,式(1)の主にコンプライアンス項Kθによって議論することはできる.そのような観点で考えれば,積層型圧電素子は剛性が高くほとんどバックドライブしないが,バイモルフ型圧電素子は基板の弾性変形によるコンプライアンスを示す.また,SMA 自体は弾性率の高いアクチュエータ材料であるが,薄膜,コイル,細径線といった形状で使われることが多く,実際にはこれらの弾性変形によりコンプライアンスを示す.
5 機構のバックドライバビリティ
ロボットのバックドライバビリティはリンク機構の特性にも大きく依存する.
5.1 特異点近傍でのバックドライバビリティ
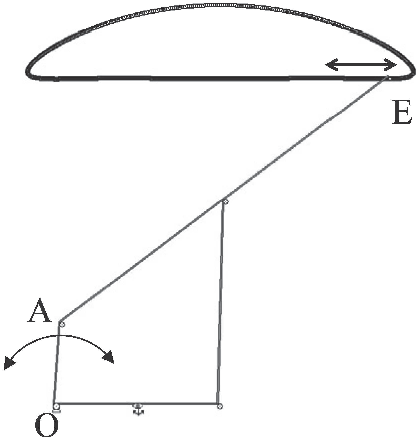
ロボット関節のバックドライバビリティは,その姿勢によって大きく変わる.チェビシェフの疑似直線機構(図3)を例にとって説明しよう.これは,節OA をモータで回転させ点E に脚軌跡(直線部分が接地相に,曲線部分が遊脚相に対応する)を描く機構で,ロボコンの歩行ロボットでもしばしば用いられる [3].
点E に軌道に沿った方向に力を加えてバックドライブするとき,モータに発生するトルクや回転速度は,機構の姿勢によって大きく変わり,そのためこの機構のバックドライバビリティも変化する.機構の姿勢によってバックドライバビリティが変化する現象はリンク機構一般に見られ,特異点近傍でバックドライバビリティは大きく低下する.
5.2 外力とは違う方向に動くロボットの手 [4]
ロボットアームと握手をして手を上下に振ろうとすると,アームは上下ではなく斜め方向に動きたがることがある.これは非常に不自然で,人間との共存を目指すヒューマノイドでは避けたい動きである.
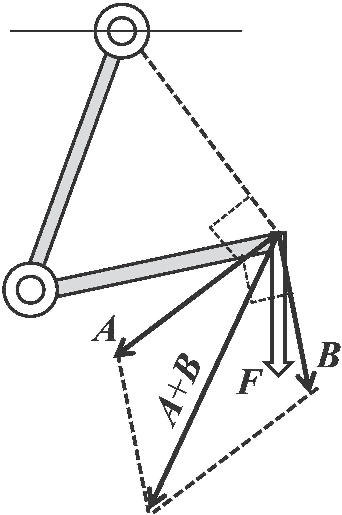
この奇妙な動きの原因を図4 で説明しよう.アーム先端に下方に力F を加えると,肩関節と肘関節にそれぞれトルクが発生し,それぞれの関節がバックドライブする.このとき,肩関節と肘関節の回転によってアーム先端にはそれぞれAとB の動きが生じる.したがってアーム先端は,力F とは異なるA+B 方向に動くことになる.ロボット機構におけるバックドライバビリティは,動かす向きによって変わり,また力の方向とそれによって動作する方向が一般的には一致しない.
5.3 ヒトのからだを駆動する増速機構 [4]
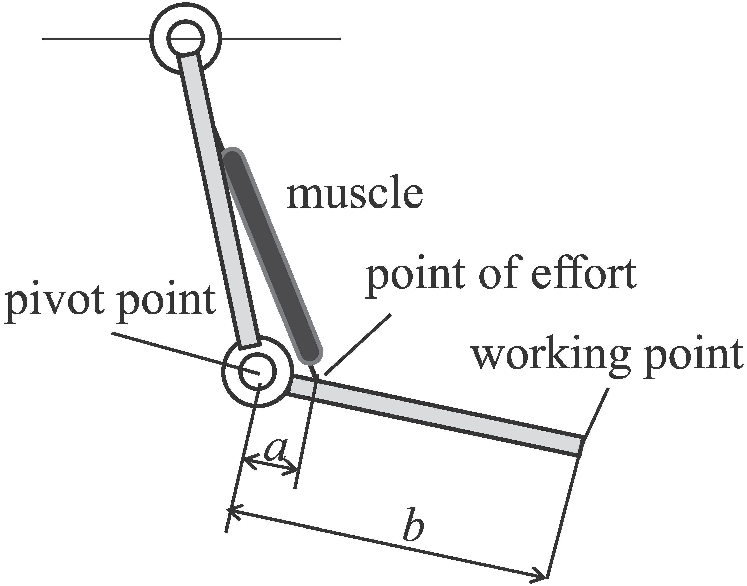
ロボット機構では一般にアクチュエータの動きを減速して使うのに対し,ヒトのからだでは筋肉の動きを増速して使う.図5 に示すように,ヒトのからだでは,支点と力点の距離a が,支点と作用点の距離b よりも短く,「増速」機構が構成されている.
逆に言えば,ヒトのからだでは手先にかかる外力が増幅されて筋肉に伝わるのでバックドライブしやすく,ロボットでは手先にかかる外力が減少されるのでバックドライブしにくい.これが,ヒトのからだとロボットのバックドライバビリティの違いを生み出す要因の一つである.
6 バックドライバビリティの再考
ターミノロジーとしての「バックドライバビリティ」はいまだ少々曖昧なところがある.本稿では,バックドライブ時に生じる抵抗として,摩擦のみならず,コンプライアンス,粘性,慣性を含め,また,駆動系の構成としては,サーボバックドライブやメカニカルバックドライブも含めて話を進めた.このように広義にバックドライブをとらえることは,ロボットの特性を議論する上では有用と考える.
さらに,例えば,ロボット手先のバックドライバビリティを,手先にかかる力とモーメントの6 成分と,それらによって生じる手先の移動と回転の6 成分を結び付ける多入力多出力関数ととらえれば,ロボットの特性を論じる指標の一つとしてさらに議論が発展すると期待する.
参考文献
[1] 日本機械学会編:機械工学事典.p.1037,日本機械学会,1997.
[2] 日本機械学会:ロボティクス.p.90,日本機械学会,2011.


